����PROFIBUS�ֳ�����������-60��װ�������ϵͳ
��Ϊ��ǰ�Զ������������ŵļ���֮һ���ֳ������Դ��ڲ��ϵķ�չ�У������Ѿ��������������ֳ����߱�����PROFIBUS��LonWorks��CAN��HART�ȡ��ɲ�ͬ��ҵ��չ�������ֳ����߲�Ʒ����ˮƽ����һ����Ӧ�÷�Χ��ǰ��Ҳ������ͬ��������û�й���ͳһ���ֳ����߱�����ˣ��ڲ��øü�������ʵ�ʵĿ���ϵͳ���ʱ�������ۺϿ��Ǹ���������أ�ʹ��ѡ��IJ�Ʒ����ϵͳ��ʵ����Ҫ�������ϼ�����չ��������
�ܣ�60��װ����ϵͳ��һ���������ַ������ԭ���Ĵ��������������豸��Ϊ�˱�֤�����ķ��䰲ȫ��ϵͳ�ȶ����У��Կ���ϵͳ�İ�ȫ�ԺͿɿ���Ҫ��dz��ߡ��ۺϱȽ������ϼ��ֽ�Ϊ���е��ֳ����ߣ�ѡ���˵¹������ӹ�˾����PROFIBUS���ߵ�S7ϵ��PLC��Ʒ�����������걸�������Ƚ��ļ�װ�������ϵͳ��
һ��PROFIBUS����
PROFIBUS��Ϊ����ŷ�ޱ�EN50170���ֳ�����ϵͳ����һ�ֹ����ԵĿ���ʽ���ֳ����߱����������ӡ�ABB��ʮ���ҹ�˾�͵¹���������ͬ�Ƴ�����Ŀǰ�������ƹ��ٶ���졢�û���ࡢӦ�÷�Χ��㡢���з�չǰ�����ֳ�����.PROFIBUS���߶�ISO/OSIģ�͵��߲�ͨ����ϵ�ṹ�������Ż���ֻ�������㡢������·���Ӧ�ò㣬���������ͽṹȷ�������ݴ���Ŀ����Ժ���Ч�ԡ�PROFIBUS���߰���PROFIBUS-DP��PROFIBUS-FMS��PROFIBUS-PA�������ݰ汾������DPЭ����Ҫ���ڷֲ�ʽ����ϵͳ�ĸ������ݴ��䣬��ߴ����ٶȿɴ�1.5Mbps�������ʺ��Զ������������Ӧ�á�
PROFIBUS��ʹ��ɢʽ���ֻ����������ֳ��ײ㵽���伶���绯��ϵͳ��Ϊ��վ�ʹ�վ����һ�ֵ���վ�����վ������ṹ����վ�������ߵ�����ͨ�ţ���������������Ϣ����վΪ��Χ�豸������������豸���������ȣ�����û�����߿���Ȩ�����Խ��յ�����Ϣ����ȷ�ϻ���վ��������ʱ����������Ϣ��
����ϵͳ�ṹ
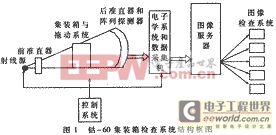
���廪��ѧ���ܼ�������о�Ժ�������Ƶ��ܣ�60��װ����ϵͳ�����˦���������������õ�ԭ�������ƶ�ʽ60Co��ҵ���������Ϊ����Դ������Դ������Ħ��������������������������̽����ת��Ϊ������ǿ�ȳ����ȵĵ��źţ�����ǰ�÷Ŵ����Ŵ��źŲɼ���·���A/D�任���͵����ݲɼ������õ���ӳ��װ��������ֲ�����Ķ�άͶӰͼ���ܣ�60��װ����ϵͳ��������Դ��ֱ��������̽����������ѧϵͳ�����ݲɼ�����ͼ����ϵͳ������ϵͳ�Ȳ�����ɢ���ͼ1��ʾ��
����ϵͳ���ܣ�60��װ����վ����Ҫ��ɲ���֮һ����Э������ϵͳ������������֤�����ܣ�60��װ����ϵͳ���������С�����ϵͳ��Ҫ�����ϳ������п��ơ�ͼ�����ݲɼ����ơ�����Դ���ſ��ơ���ȫ�������ƺ�ϵͳ���м�صȲ��֡�����ϵͳ�����ܿɻ���Ϊ������Σ��ֳ��豸�㡢�豸���Ʋ������ز㣬��ṹͼ��ͼ2��ʾ���������������ν��о�����ܡ�
1���ֳ��豸�㣺�ɸ��ִ�������ִ�л�����ɣ���Ҫ������紫�������ظ���Ȧ���г̿��ص��ֳ��ź������豸�ͱ�Ƶ������������ݲɼ����������豸����Щ��������豸��ΪS7-215��I/O������ֳ����ߡ�
2���豸���Ʋ㣺�ɷֲ��ڸ��������ֳ���S7-215PLC�Ͱ�װ������̨��S7-315PLC���ɣ����Ƿֱ����ø���DP�˿�ͨ��һ������˫������������������PROFIBUS�ֳ��������硣����S7-315PLC��Ϊ��վ���������ߵĴ������ʣ�Ϊÿ����վ���������ַ�����S7-215PLC��Ϊ��վ�������ֳ�����Ϣ�ɼ�������վ�����й��źţ��Լ�����ִ�п���������㼯װ����ϵͳ���������̿���Ҫ��
3��������ز㣺��Ϊ����ϵͳ���˻������ӿڣ�ͨ����װ�������ӹ�˾SIMATICWINCC��̬�����������ؼ����ʵ�ֶ��ܣ�60��װ����ϵͳ��״̬��ء������趨�ͱ�����ʾ����¼�ȣ������ṩ����������ͳ�ƺ��ַ���ͼ����
����ϵͳ����
�ÿ���ϵͳ��ɶԼ�װ�������̵����п��ƣ���ʵ��ϵͳ�ķ��䰲ȫ��������ֹ������Ա�������䣬��֤������Ա�İ�ȫ��ϵͳ���������С���Ҫ���ܰ�����
1�����ͨ����㣺��װ�俨�����ϳ����������ƣ�
2���ϳ������������١����١�ͣ�����ƣ���֤��װ�䰲ȫƽ�Ⱦ������ͨ����
3�����ͨ���յ㣺��װ�俨��ʻ���ϳ����������ƣ�
4�����ݲɼ������ƣ���ɲɼ�
PROFIBUS �ֳ������� ������ϵͳ ������£�
- ���ڴ���ͨѶ��PROFIBUS���ܷ�������������(02-15)
- ����16λDSP��PROFIBUS-DP��վϵͳ���(07-02)
- RS485תprofibus-DP����Ӧ�ð���(12-21)
- ����ProfiBus�Ĺ��̿���ϵͳ��Ӳ����̬�о�(12-21)
- ����PROFIBUS-DP�ļ��������ϵͳ(12-21)
- ����PROFIBUS-DP���ߵı�Ƶ������ϵͳ(12-21)