图像几何变换的DSP算法研究与实现
B型超诊断仪是运用超声传导技术和超声图像诊断技术的一种医疗诊断仪器,它主要用亮度调制方式来显示回波信号的强弱,反射回的时间反映扫描的深度,从而反映人体内部结构特征,也称作“断层图像” [1]。其中数字扫描变换的精度直接影响图像的分辨率和几何失真度,变换算法的复杂度直接影响图像处理运算量和图像处理的实时性,也直接影响后续图像处理的质量。
DSP易于满足图像处理中运算量大、精度高、实时性强、数据传输速率高等要求。采用高速DSP芯片作为B超图像数字扫描变换的核心数据处理单元,能很好地实现不同B超图像处理算法,且能直观、快速地观察到变换结果,实用性强[2]。此外,对于一些新型的运算量较大的图像处理系统,DSP也能很好地进行扩展,从而使高速B超图像处理系统得到广泛的使用。对于一些新型的运算量较大的B超图像处理系统,DSP也能很好地进行扩展[3]。
1 图像的几何变换
一个完整的B超系统如图1所示[4]。
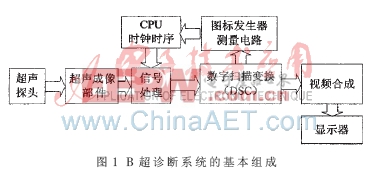
当B超探头获得激励脉冲后发射超声波,经过一段时间延迟,再由探头接收反射回的回波信号,探头接收反射回来的回波信号经过滤波、对数放大等信号处理[5],由DSC电路进行数字变换形成数字信号,在CPU控制下进一步进行图像处理,再同图表形成电路和测量电路一起合成视频信号送给显示器形成B超图像,也称二维黑白超声图像。B超的超声探头按形状通常可分为线阵式和凸阵式。线阵式和凸阵式均用亮度表示回波信号的强弱,反射的时间长短表示扫描的深度。线阵式B超探头的形状为矩形,扫描采集回来的信号为一个矩形,通过处理后可直接在显示器上显示。而凸阵式B超探头为圆弧形,它接收到的回波信号为一个扇形的信号,需对它进行几何变换才能变为适合人眼观察的图像。线阵式和凸阵式回波信号的示意图如图2所示。
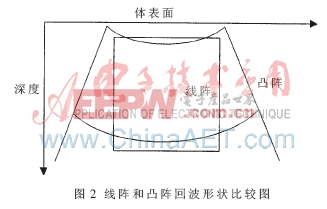
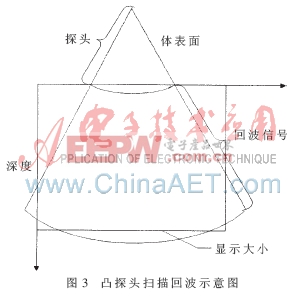
由图2可知,凸阵式扫查方式比线阵式扫查方式的视野更大,且凸阵式的物理外形更与人体接近。凸阵式扇形扫查B超的前部为圆弧形,相应的B超图像称为扇形图像,即为一散形面,其中散角为凸阵两边阵之角度,散形中心为探头弧线圆心,散形半径则与探头半径和B超探测深度有关。换能器均匀分布在圆弧面上。许多阵元沿该圆弧面排列,此类换能器中的阵元按顺序发射和接收超声波,这些超声扫查线对应图像存储器的列地址,每条扫查线上的样本对应图像存储器的行地址,采样值依次写入图像存储器。
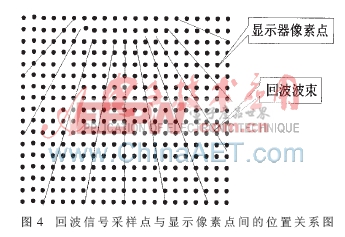
凸阵式扇形扫查的回波信号为一个扇形,可将它看做极坐标形式,图3显示出这种极坐标形式的采样点与光栅扫描显示像素的位置关系。从图3中可见,B超所采集到的回波信号为一个极坐标形式的扇形面,而显示器的像素分布为一个直角坐标的矩形。同时,从图4中可以看出信号采样点与显示像素点的位置并不一一对应,相邻扫查线之间还有很多空缺的像素点,这种现象在远场尤为明显[6]。设计DSP算法,根据空缺像素周围的回波信号采样的近似值,并在显示此图像之前将这些近似值插入到相应的空缺处,使图像均匀连续。同时,B超检查对于图像的质量以及实时性要求都很高。要提高图像质量就要增加处理精度,以提高图像的分辨率,但处理精度要求越高,则需存储器字长越长(字长越短,则图像数字化时的量化误差和量化噪声均加大),对相同大小的一帧图像所需存储器的容量越大。因此系统完成一帧图像的数字处理所需时间加长,使得系统的实时性得不到保证。而且,算法的复杂度和运算量也将直接影响到图像的实时性。因此,必须通过设计相应的DSP算法以及运算精度来保证变换后的图像的分辨率和实时性。
2 图像几何变换的DSP算法研究
B超是一种分辨率和实时性要求都很高的仪器,采用有效的DSP算法是提高B超整体性能的关键。不同的DSP算法运算量会有很大的差异,运算量越大,图像越清晰,处理时间越长。现代DSP算法就是在分辨率和运算量之间寻找折中,典型的算法分为一维线性算法和二维线性算法。
2.1 一维线性算法
NNIA算法是最早的一维线性变换算法,它主要运用直角坐标与极坐标之间的几何变换关系来实现。凸探头采集到的信号为一个扇面,可视为极坐标的形式,显示器的像素分布则是矩形,可视为直角坐标方式。通过极坐标与直角坐标的变换关系,可得到每个回波信号在显示器上的对应值:
通过这种算法,每个回波点都能求出相应的像素值并进行填充,而对于给定夹角的扇形,回波点所对应的图像可以预先计算出来,而且采用这种算法简单直观。分析其运算量,从算法上看,假设总共有X个回波点,每个回波点进行几何变换需要计算正弦和余弦的值和两次乘法。
改进NNIA算法是在NNIA算法的基础上建立起来的,它从像素点反过来寻找对应回波点来对像素进行填充。由于像素点是连续的,因此每个像素点都能找到与其相对应的回波数据的值,算法模型如图5所示。
- 单片式降压型稳压器为DSP提供片内电源排序(01-09)
- 什么是PCI总线?其接口芯片的应用(01-26)
- 功率分配系统(PDS)设计:利用旁路电容/去耦电容(04-29)
- 具有多个电压轨的FPGA和DSP电源设计实例(05-22)
- 具有多个电压轨的FPGA和DSP电源设计实例(二) (05-22)
- 基于DSP和CPLD的移相全桥软开关电源数字控制器(06-02)