边缘图像连通区域标记的算法研究和SoPC实现
连通区域标记算法用于从图像中提取目标区域,并计算目标区域的特征参数,是目标检测和目标识别的关键步骤[1],其在工业检测、光学字符识别、机器人目标跟踪等领域有广泛的应用。
目前的连通区域标记算法中,基于等价标号的标记算法需要至少扫描图像两次,并且要处理标记冲突问题,其执行时间过于依赖连通区域的复杂程度[2]。而基于区域生长的标记算法只需扫描图像一次,没有标记冲突问题,对复杂图像适应性好,但目标点数多时搜索效率低,堆栈空间消耗大。
本文所标记的图像是经过边缘检测得的二值边缘图像。相对于原始图像(或其二值图像),边缘图像保留了轮廓信息,目标点数大大减小,适合使用区域生长标记算法。但是,现有的区域生长标记算法一方面需要对每一个目标点进行N×N窗口搜索,搜索效率低并会出现同一像素重复扫描现象;另一方面,如果搜索窗口较小(如最常用的3×3,也称8邻域),虽然干扰少,但是同一个连通区很容易被标记成若干个不同的连通区;而如果增大搜索窗口(如7×7),虽然得到的标记图像连通性好,但是会引入较多干扰点。
1 基于生长算法的区域标记
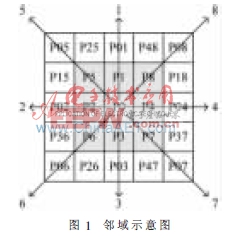
像素P的上、下、左、右、左上、左下、右上、右下的像素集合为像素P的8邻域,邻域内所有目标点同属于一个连通区。通常采用8邻域生长法则进行连通区域标记。
1.1 8邻域区域生长算法
设边缘图像的背景像素为255,目标像素为0,对其进行8邻域区域生长标记的步骤如下:
(1)按从上到下、从左到右的顺序扫描图像,遇到目标像素P时,标记为新的标记值L;
(2)以P为种子点,将其8邻域内的目标像素标记为L;
(3)将所有与L像素8邻域内相邻的目标像素标记为L,直到该连通区域标记完毕;
(4)继续按顺序扫描图像,重复前三步,直到图像中所有目标像素都标记完毕。
每个连通区域的起始点是按顺序扫描整个图像得到的,而各个连通区域的标记过程是递归调用生长函数的过程。生长函数依次扫描目标点的8邻域,若遇到新的目标点,则将当前目标点的处理过程压栈,转而扫描新目标点的8邻域,如此不断地将目标点压栈。当某一目标点的8邻域内没有新的目标点,则将其弹栈,当所有目标点都弹栈完毕,则该连通区域标记完毕。
1.2 邻域重复扫描问题
在图1中,P0的8邻域和P1、P2、P3、P4的8邻域有4个像素的重叠,与P5、P6、P7、P8的8邻域有2个像素的重叠。按上述的8邻域区域生长算法,当P0与P4均为目标点时(设递归过程由P0 向P4传递),P0、P1、P8、P3、P7这5个像素点被扫描了2次;当P0与P5均为目标点时(设递归过程由P0 向P5传递),P0、P1、P2这3个像素点被扫描了2次。
1.3 8方向邻域生长算法
8方向邻域生长算法的思路是:目标点A和目标点B相邻,从A到B有8个方向,当按某个方向从A传递到B的8邻域搜索时,只搜索B的8邻域中未被A的8邻域覆盖的部分。例如,图1中从P0传递到P4的8邻域搜索时,只搜索P18、P04、P37;从P0传递到P5的8邻域搜索时,只搜索P05、P25、P01、P15、P02。即:
8方向邻域生长算法由9个生长函数组成。对于连通区域的起点,必须搜索8个方向,此时调用主生长函数。在目标点传递的过程中,按其传递方向,按式(1)调用相应的生长函数搜索邻域点。区域标记从起点调用主生长函数开始,过程是8个生长函数互相调用,最后这些函数都返回时,区域标记完毕。
该方法充分利用了从目标点A到目标点B的方向信息,从而在搜索B的邻域时,搜索个数降低为原来的3/8或5/8,平均效率提高了50%。
1.4 边缘端点与区域合并
仅用8邻域搜索连通区,往往得到的连通区域并不完整,连通性不好。图2(a)中,右半部分是圆形左下局部放大图。当按逆时针搜索到图中圆圈标识的“11”时,在其8邻域内没有新的目标点,因此也就和区域“15”断开了。当搜索到某个目标点时,其8邻域内没有新的目标点,则该点就是边缘的“末端”。一个区域可能有多个末端。
在图2(b)中,右半部分是“米”字中心局部放大图。图中圆圈标识的“4”点,其8邻域内有新的目标点(左下点),但最近的“3”点并不在其邻域内,因此两个连通区断开。对于单个像素宽的边缘图像,其走向基本一致;而走向改变较大的点,就是图形的“拐点”,此时容易出现区域断开的现象。
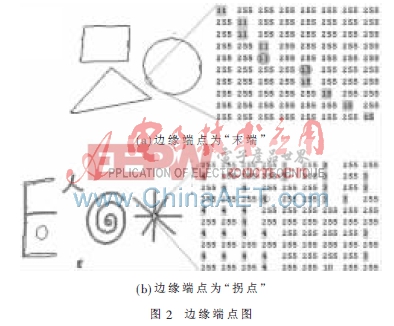
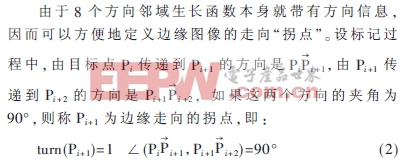
图1中,假设三个目标点的传递顺序是P0到P5,P5再到P02,则P5就是走向拐点。
要改善连通性,可以增大搜索范围,如增大到7×7范围。这样虽然在一定程度上改善了连通性,但是会引入更多的干扰点。而本文的思路是:首先按照上述8方向邻域生长算法搜索连通区域,同时记录边缘“端点”,然后通过比较各个区域的端点,将端点较近的两个区域合并。结合前文的分析,本文认为边缘端点包括3类:区域起点;边缘末端;边缘拐点。这样得到的端点个数少,包含了绝大部分的“断点”。通过不断比较各个区域的端点,相近则将区域合并,最终得到合并后的标记图像。
该方法实质上是在小尺度内搜索连通区,并利用得到的边缘端点在大尺度内进行区域合并,既不引入更多的杂点,又改善了标记图像的连通性,并在保证区域合并正确率的同时,提高了合并效率。
- 基于Nios II的数字音频录放系统的设计(01-08)
- 基于SOPC技术的交通事故自动处理设备(10-05)
- SOPC设计中自定义IP的开发(02-18)
- 基于SOPC技术的软件无线电系统研究(04-07)
- 基于DSP的彩色TFT-LCD数字图像显示技术研究(05-05)
- 3D集成电路将如何同时实现?(04-09)