DSP航姿信号模拟器硬件设计
时间:10-16
来源:互联网
点击:
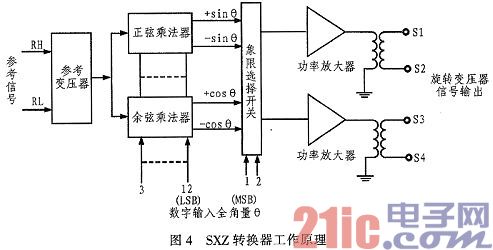
其中等式左边为输出电压,θ为输入数字角,K为比例系数,URH-RL是参考电压。
转换器的工作原理框图如图4所示。
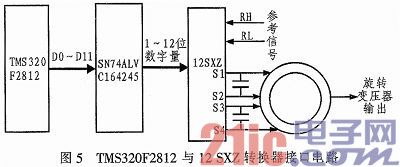
模拟器的核心是DSP 2812,通过软件控制能产生所需要的航姿信号,并且系统带有自检功能,在系统设计中,DSP控制I/O口直接对12SXZ进行操作,产生模拟信号。上面我们知道DSP有两种电压,I/O口的电压为3.3 V,我们所用到的转换芯片为TTL电平5 V电压,考虑到DSP产生信号的驱动能力,首先需要电平转换,把DSP端口输出的3.3 V电平转变为5 V。采用的电平转换芯片为SN74ALVC164245,此芯片是16路双向的电平转换芯片,由引脚DIR控制其转换方向。转换芯片SXZ为12位数度的转换器,用DSP的数据口D0~D11与电平转换芯片中的12路相连,转换后的12位电平再与SXZ的12位数字量输入端相连,DSP与12SXZ转换器接口电路如图5所示。
4 结论
文中介绍了基于DSP技术的航姿信号模拟器的硬件设计电路,该方法克服了传统模拟技术的结构复杂、精度低、可靠性差等缺点。通过软件编程能够实现航向姿态信号,通过对本模拟器的开发、调试到应用,使得模拟器具有低功耗低、体积小等优点,便于现场调试,可以在多种环境下使用,能够在排除飞机故障及维护飞机安全及提高飞行质量等方面会有重大改善。
- 单片式降压型稳压器为DSP提供片内电源排序(01-09)
- 什么是PCI总线?其接口芯片的应用(01-26)
- 功率分配系统(PDS)设计:利用旁路电容/去耦电容(04-29)
- 具有多个电压轨的FPGA和DSP电源设计实例(05-22)
- 具有多个电压轨的FPGA和DSP电源设计实例(二) (05-22)
- 基于DSP和CPLD的移相全桥软开关电源数字控制器(06-02)