DSP航姿信号模拟器硬件设计
飞机的航向与姿态是飞机操纵的重要参数,航姿信号包括航向信号和姿态信号,一般把飞机的俯仰角、倾斜角、航向角、转弯角速度等称为全姿态。测量全姿态,通常采用的陀螺仪进行,也称为陀螺仪表,根据各种飞机的使用要求,有多种陀螺仪表,比如地平仪、综合罗盘、转弯仪、航向姿态系统等。但是无论哪种情况,其信号输出的变换大多是通过自整角机或旋转变压器来实现的。
航姿信号模拟器是为了给待测的仪表设备或实验室研究提供可以人工调节和控制的信号源而设计的,可以产生各种频率的航姿信号及用户自己定义的任意波形等,以便对飞机性能进行测试。传统的航姿信号模拟系统开发是基于VXI、PCI等总线基础上,大多使用硬件电路设计与实现,通过PC机进行分析处理,功能相对来说也比较完善,但是电路的结构比较复杂,体积过于庞大,不适合在外场使用,并且传统的模拟器使用范围比较局限,就造成了在成本方面有许多的浪费,因此开发一个新型的、可编程的通用型模拟器是非常有必要的。本文设计的是一种便携式的航姿信号模拟器,不但体积小携带方便,而且处理器采用的是具有高速数据计算能力的DSP。可以对旋转变压器输出的轴角信号进行预
处理、传输、显示及存储等。该系统可以广泛用于航空、航天、雷达和火炮控制等军用装备,也可以用于数控机床和机器人等民用设备中,应用前景广阔。
1 旋转变压器工作原理
旋转变压器是自动控制中一种精密的微电机,其输出信号与转子角度呈一定的函数关系,即可以单机运行,也可以成对或多机组合使用。从物理本质看,旋转变压器是一种能转动的变压器,其原边、副边分别放置在定子、转子上,原、副边绕组之间的电磁耦合程度与转子的角度有关,其工作原理在本质上和普通变压器没有多大区别。由于转子转动时,其转出绕组和定子励磁绕组相对位置发生变化引起互感变化,使得输出电压与转角成正余弦关系,所以旋转变压器又称正余弦变压器。旋转变压器的工作原理如图1所示,两对定子的绕组在空间上正交放置。
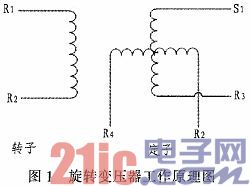
当在转子接线端R1、R2施加频率为ω激励信号时,当转子旋转时,分别在定子绕组上得到的信号为:
ES1S3=Esin ωt sinθ (1)
ES2S4=Esin ωt cosθ (2)
其中θ是转子转过的角度,E是电磁感应的幅值,然后可以根据它们的相位关系解算出转子的位置。
2 DSP控制外围电路设计
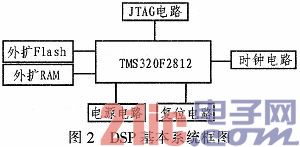
本设计选用的核心控制芯片是TMS320F2812,但是必须提供基本的外围电路才能发挥核心控制电路的作用。一个典型的DSP最小系统应该包括DSP芯片、还有为DSP芯片提供合适电源的电源电路、触发DSP初始化的复位电路、时钟电路及用于在线仿真和下载的JTAG接口电路。另外由于考虑到需要跟上位机进行通信,完成数据和控制信号的传送,在此基础上添加了串口通信电路。DSP的基本系统框图如图2所示,外扩RAM是用来放置大量的信号数据,而外扩FLASH是用来存放控制程序。DSP基本系统框图如图2所示。
1)电源设计
DSP芯片由于采用两种不同的电压,内核1.8 V电压和IO口3.3 V电压,所以对DSP系统供电时一般都采取双电源,本设计方案中采用TI公司专门为DSP配套的电源芯片TPS767 D301来提供电源,这款芯片属于线性DC/DC变换芯片,给TPS767D301提供5 V的直流电源就可以产生满足F2812的3.3 V和1.8 V的电压,直接给DSP提供电源,此外这个电源芯片的最大输出电流可以达到1 A,可以同时给DSP芯片和少量的外围电路供电。
2)时钟和复位电路设计
DSP2812芯片的时钟有两种引脚连接方式,一种是利用其内部所提供的晶振电路,在其X1/XCLKIN和X2引脚之间连接一晶体来启动内部振荡器;另一种是直接将外部的时钟源直接输入X1/XCLKIN引脚上,X2引脚悬空,本设计中采用的为第一种方法,如图3所示。
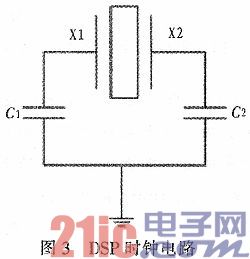
DSP2812芯片具有锁相环时钟模块(PLL),可以输入时钟进行倍频,所以采用30 MHz的外接晶振,经过锁相环倍频后,能够实现系统的150 MHz要求。
由于电源模块TPS767D301芯片自身能够产生复位信号,且此复位信号可以直接供DSP芯片使用,所以本设计中没有设置专门的复位芯片。
3 12SXZ D/A转换芯片工作原理及其与DSP接口设计
12SXZ转换芯片由以下几部分组成:参考变压器、象限选择开关、正余弦乘法器、功率放大器、输出变压器等五部分。数字全角量和参考信号输入经正、余弦乘法器之后,被转换成代表角度的正余弦信号,再经功率放大器放大后,具有了1.3VA的负载能力,再经输出变压器隔离、升压后,变成自整角机/旋转变压器形式的三线、四线模拟信号输出。模拟输出的表达式为:
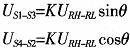
其中等式左边为输出电压,&t
- 单片式降压型稳压器为DSP提供片内电源排序(01-09)
- 什么是PCI总线?其接口芯片的应用(01-26)
- 功率分配系统(PDS)设计:利用旁路电容/去耦电容(04-29)
- 具有多个电压轨的FPGA和DSP电源设计实例(05-22)
- 具有多个电压轨的FPGA和DSP电源设计实例(二) (05-22)
- 基于DSP和CPLD的移相全桥软开关电源数字控制器(06-02)