水下蛇形环境勘测机器人
时间:12-03
来源:互联网
点击:
5 测试与验证
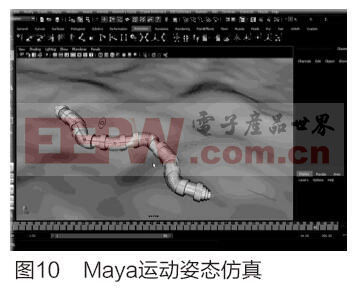
5. 1 Maya运动仿真
从整个制作的过程来看,机器人整体的机械结构设计较为复杂,但是最终还是完成了结构的设计、加工与装配。运动姿态在Maya软件上进行了仿真测试,为蛇形机器人的步态设计带来了方便,如图9所示。
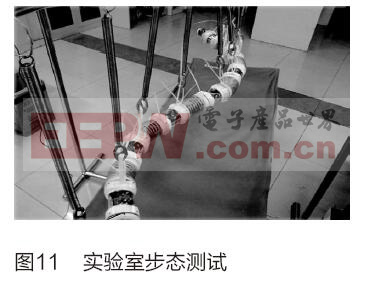
5. 2 实验室测试
在Maya软件上实现了蛇形机器人的动态仿真后,在实验室进行了“悬空测试”,验证所设计的步态的可靠性,如图10所示。

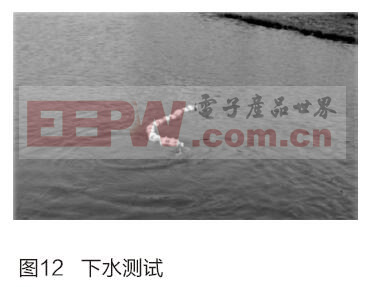
5. 3 下水测试
为了进一步验证步态设计的实际可行性以及蛇形机器人的整体防水性,团队进行了一次下水试验。试验结果表明,由于蛇形机器人自身的重力略小于其所能达到的最大浮力,蛇形机器人在水中静止状态下可以实现漂浮,与理论计算结果相符,在水面上的二维蜿蜒步态运动效果较好,如图11所示。
6 总结与展望
6. 1 创新之处
(1)借助于iNEMO board,使得让原本开环的蛇形机器人系统实现了闭环控制,相比于传统各类蛇形机器人的开环控制有了巨大的突破。
(2)正交连接的舵机组成的动力结构实现了机器人的三维运动,使得运动姿态更加丰富,应用领域也会更加广泛。
(3)模块化的蛇形机器人骨架设计思想,使得某一关节出现问题时可以进行独立更换。
(4)基于LabView制作的上位机软件功能强大,实现了各种数据和指令的实时传输以及摄像头捕捉到的视频显示。
6. 2 展望
蛇形机器人是一种新型的仿生物机器人,与传统的轮式或两足步行式机器人不同的是,它实现了像蛇一样的“无肢运动”,是机器人运动方式的一个突破,具有结构合理、控制灵活、性能可靠、可扩展性强等优点。
本文设计的水下蛇形机器人希望将来能够在海洋复杂环境勘测中得到应用,如军事侦察、海底矿藏调查、输油管道检查、钻井平台水下结构检修、电缆检查、水下考古、海上养殖及江河水库的大坝检查等领域。
参考文献:
[1]叶长龙,关鼎.蛇形机器人的耦合驱动模块化单元设计[A].沈阳工业大学学报.2004:13-17
[2] 赵铁石,林永光,缪磊,等.一种基于空间连杆机构的蛇形机器人[A].机器人. 2006:9-13
[3]汪洋,李斌,陈丽,等.蛇形机器人控制系统的设计与实现[B].机器人.2003:17-25
4]卢振利,马书根,李斌,等.基于循环抑制CPG模型控制的蛇形机器人蜿蜒运动.自动化学报.2006:23-28
[5]叶长龙,马书根,李斌,等.三维蛇形机器人巡视者II的开发[J].机械工程学报. 2009:38-45
[6]左志坚,马书根,李斌,等.蛇形机器人水下蜿蜒运动的仿真研究. 2008.5-10
[7]CRESPI A, ANDRE B, ANDRE G,et al..AmphiBot I: Anamphibious snake-like robot[C], Robotics and Autonomous Systems, v 50,n 4, Mar 31,2005,Biometric Robotics,p 163-175
[8]CRESPI A ,IJDPEERT A J. AmphiBot II: An amphibious snake robot that crawls and swims using a central pattern generator[C], Proc. 9th Int. Conf. Climbingand Walking Robots,2006,pp.19-27
[9] YAMADA H,CHIGISAKI S, MORI M,et al.. Development of Amphibious Snake-like Robot ACM-R5[C].Int.Symposium on Robotics.Vol.36.2005.133
[10] Alessandro Crespi, Andre Badertscher, Andre Guignard and Auke Jan Ijspeet,Swimming and Crawling with an Amphibious Snake Robot [C],Proceedings of the 2005 IEEE International Conference on Robotics and Automation,Barcelona,Spain, April.2005,3024-3028
5. 1 Maya运动仿真
从整个制作的过程来看,机器人整体的机械结构设计较为复杂,但是最终还是完成了结构的设计、加工与装配。运动姿态在Maya软件上进行了仿真测试,为蛇形机器人的步态设计带来了方便,如图9所示。
5. 2 实验室测试
在Maya软件上实现了蛇形机器人的动态仿真后,在实验室进行了“悬空测试”,验证所设计的步态的可靠性,如图10所示。
5. 3 下水测试
为了进一步验证步态设计的实际可行性以及蛇形机器人的整体防水性,团队进行了一次下水试验。试验结果表明,由于蛇形机器人自身的重力略小于其所能达到的最大浮力,蛇形机器人在水中静止状态下可以实现漂浮,与理论计算结果相符,在水面上的二维蜿蜒步态运动效果较好,如图11所示。
6 总结与展望
6. 1 创新之处
(1)借助于iNEMO board,使得让原本开环的蛇形机器人系统实现了闭环控制,相比于传统各类蛇形机器人的开环控制有了巨大的突破。
(2)正交连接的舵机组成的动力结构实现了机器人的三维运动,使得运动姿态更加丰富,应用领域也会更加广泛。
(3)模块化的蛇形机器人骨架设计思想,使得某一关节出现问题时可以进行独立更换。
(4)基于LabView制作的上位机软件功能强大,实现了各种数据和指令的实时传输以及摄像头捕捉到的视频显示。
6. 2 展望
蛇形机器人是一种新型的仿生物机器人,与传统的轮式或两足步行式机器人不同的是,它实现了像蛇一样的“无肢运动”,是机器人运动方式的一个突破,具有结构合理、控制灵活、性能可靠、可扩展性强等优点。
本文设计的水下蛇形机器人希望将来能够在海洋复杂环境勘测中得到应用,如军事侦察、海底矿藏调查、输油管道检查、钻井平台水下结构检修、电缆检查、水下考古、海上养殖及江河水库的大坝检查等领域。
参考文献:
[1]叶长龙,关鼎.蛇形机器人的耦合驱动模块化单元设计[A].沈阳工业大学学报.2004:13-17
[2] 赵铁石,林永光,缪磊,等.一种基于空间连杆机构的蛇形机器人[A].机器人. 2006:9-13
[3]汪洋,李斌,陈丽,等.蛇形机器人控制系统的设计与实现[B].机器人.2003:17-25
4]卢振利,马书根,李斌,等.基于循环抑制CPG模型控制的蛇形机器人蜿蜒运动.自动化学报.2006:23-28
[5]叶长龙,马书根,李斌,等.三维蛇形机器人巡视者II的开发[J].机械工程学报. 2009:38-45
[6]左志坚,马书根,李斌,等.蛇形机器人水下蜿蜒运动的仿真研究. 2008.5-10
[7]CRESPI A, ANDRE B, ANDRE G,et al..AmphiBot I: Anamphibious snake-like robot[C], Robotics and Autonomous Systems, v 50,n 4, Mar 31,2005,Biometric Robotics,p 163-175
[8]CRESPI A ,IJDPEERT A J. AmphiBot II: An amphibious snake robot that crawls and swims using a central pattern generator[C], Proc. 9th Int. Conf. Climbingand Walking Robots,2006,pp.19-27
[9] YAMADA H,CHIGISAKI S, MORI M,et al.. Development of Amphibious Snake-like Robot ACM-R5[C].Int.Symposium on Robotics.Vol.36.2005.133
[10] Alessandro Crespi, Andre Badertscher, Andre Guignard and Auke Jan Ijspeet,Swimming and Crawling with an Amphibious Snake Robot [C],Proceedings of the 2005 IEEE International Conference on Robotics and Automation,Barcelona,Spain, April.2005,3024-3028
机器人 加速度计 陀螺仪 传感器 STM32 压力传感器 PWM 电子 温度传感器 滤波器 电路 自动化 仿真 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)