图像的机器人视觉伺服实验研究
时间:08-09
来源:互联网
点击:
dsp图像处理系统及图像处理
系统简介
本实验中采用的是北京合众达公司的seed-vpm642视频处理系统,该系统是一款专为各种视频应用而开发的pci插卡或带10/100m以太网接口的处理系统。它是在tms320dm642芯片基础上通过外扩容量为4m×64位的同步动态存储器sdram;容量为4m×8位的在线电可擦/写异步存储器flash;可配置为rs232/rs422/rs485标准的两路uart串行接口;4路pal/ntsc标准模拟视频输入,1路pal/ntsc标准模拟视频输出;4路立体声音频输入/输出;实时时钟rtc和512×8位eeprom;32位的33mhz、支持主/从模式的pci接口或者10/100mbase-tx标准以太网接口;标准ata硬盘接口;以及esam硬件加密模块。系统可实时实现多路数字视频/音频的编解码运算,如mpeg4、h.264、g.729等;可实时接收4路视频/音频输入,并实时输出。并能实现与其他io设备、计算机、存储设备、以太网络进行实时数据的高速传输和处理。系统由实验箱体、ccd摄像头、seed-vpm642处理板等组成。在箱体上已固定好两个串行接口、硬盘接口、4路图像输入和输出接口、液晶显示器等[8]。
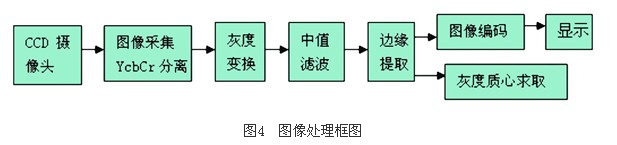
图像处理
本实验图像处理具体实现过程如图4所示。
机器人视觉伺服系统工作流程
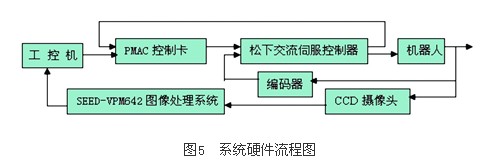
硬件流程
本实验系统由工控机、pmac运动控制卡、松下交流伺服系统、dsp图像处理系统和机器人组成。了解和熟悉松下交流伺服系统的原理和功能后,调试机器人关节伺服电机的运行,优化相关控制参数以求获得最好伺服效果;研究pmac运动控制卡的原理和功能,并与松下交流伺服系统配合,编写运动程序,不断调整和优化pmac卡的控制参数,以求获得满意的运动控制效果;对seed-vpm642图像处理系统进行深入学习和研究后,开发视频图像处理程序。组成该系统的硬件流程图如图5所示。
系统工作流程
给定期望目标物体质心图像坐标,主控程序计算其与由dsp图像处理系统反馈的质心图像坐标值的差值,判断系统是否已到达伺服位置,若已到达,则结束伺服过程;否则,求解图像雅可比矩阵的逆阵,得到机器人两个关节应转动的角度值,并将其输出给pmac运动程序,pmac卡按运动程序计算并输出转矩指令给松下伺服控制器,由它直接控制机器人关节电机的运转,通过编码器检测关节的位置,反馈给伺服控制器和pmac卡(伺服控制器对编码器信号进行处理后自身使用并可同时输出)。ccd摄像头跟随机器人运动,摄取目标物体图像,通过dsp图像处理程序处理后求得目标物体质心图像坐标,通过串口通讯传递给主控程序作为视觉反馈量,形成视觉伺服循环。
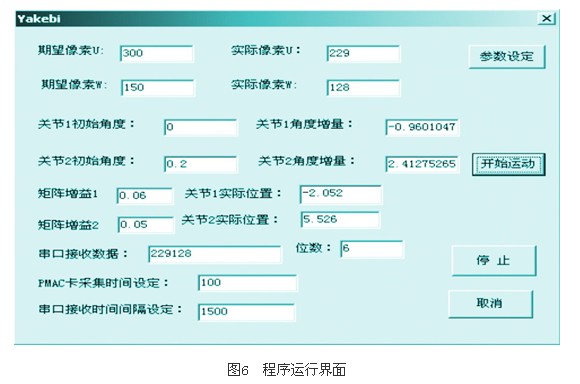
实验结果
基于上述系统原理,在vc++6.0环境下编写主控程序,主控程序主要包括界面的显示和人机交互部分、图像雅可比矩阵逆阵部分、pmac应用程序部分,串口通信部分、数据存储部分。程序运行界面如图6所示。

系统简介
本实验中采用的是北京合众达公司的seed-vpm642视频处理系统,该系统是一款专为各种视频应用而开发的pci插卡或带10/100m以太网接口的处理系统。它是在tms320dm642芯片基础上通过外扩容量为4m×64位的同步动态存储器sdram;容量为4m×8位的在线电可擦/写异步存储器flash;可配置为rs232/rs422/rs485标准的两路uart串行接口;4路pal/ntsc标准模拟视频输入,1路pal/ntsc标准模拟视频输出;4路立体声音频输入/输出;实时时钟rtc和512×8位eeprom;32位的33mhz、支持主/从模式的pci接口或者10/100mbase-tx标准以太网接口;标准ata硬盘接口;以及esam硬件加密模块。系统可实时实现多路数字视频/音频的编解码运算,如mpeg4、h.264、g.729等;可实时接收4路视频/音频输入,并实时输出。并能实现与其他io设备、计算机、存储设备、以太网络进行实时数据的高速传输和处理。系统由实验箱体、ccd摄像头、seed-vpm642处理板等组成。在箱体上已固定好两个串行接口、硬盘接口、4路图像输入和输出接口、液晶显示器等[8]。
图像处理
本实验图像处理具体实现过程如图4所示。
机器人视觉伺服系统工作流程
硬件流程
本实验系统由工控机、pmac运动控制卡、松下交流伺服系统、dsp图像处理系统和机器人组成。了解和熟悉松下交流伺服系统的原理和功能后,调试机器人关节伺服电机的运行,优化相关控制参数以求获得最好伺服效果;研究pmac运动控制卡的原理和功能,并与松下交流伺服系统配合,编写运动程序,不断调整和优化pmac卡的控制参数,以求获得满意的运动控制效果;对seed-vpm642图像处理系统进行深入学习和研究后,开发视频图像处理程序。组成该系统的硬件流程图如图5所示。
系统工作流程
给定期望目标物体质心图像坐标,主控程序计算其与由dsp图像处理系统反馈的质心图像坐标值的差值,判断系统是否已到达伺服位置,若已到达,则结束伺服过程;否则,求解图像雅可比矩阵的逆阵,得到机器人两个关节应转动的角度值,并将其输出给pmac运动程序,pmac卡按运动程序计算并输出转矩指令给松下伺服控制器,由它直接控制机器人关节电机的运转,通过编码器检测关节的位置,反馈给伺服控制器和pmac卡(伺服控制器对编码器信号进行处理后自身使用并可同时输出)。ccd摄像头跟随机器人运动,摄取目标物体图像,通过dsp图像处理程序处理后求得目标物体质心图像坐标,通过串口通讯传递给主控程序作为视觉反馈量,形成视觉伺服循环。
实验结果
基于上述系统原理,在vc++6.0环境下编写主控程序,主控程序主要包括界面的显示和人机交互部分、图像雅可比矩阵逆阵部分、pmac应用程序部分,串口通信部分、数据存储部分。程序运行界面如图6所示。
机器人 智能机器人 仿真 编码器 电路 放大器 传感器 rs485 显示器 总线 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)