基于光电传感器电路的迷宫机器人设计
时间:03-14
来源:互联网
点击:
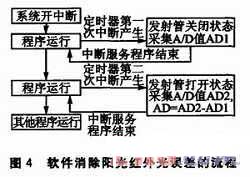
本设计采用MC9S12DG128处理器的PB0~PB4控制5个传感器的开断。实验表明,软件消除阳光红外光误差的方法效果较好。
3.3 实验结果
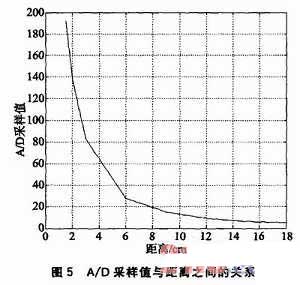
该实验使用RS232通信接口,将处理器采集获得的A/D数值实时传到上位机,然后改变车体与墙壁之间的距离,记录各个点的A/D数值,利用MATLAB绘制出A/D值与距离之间的关系图。
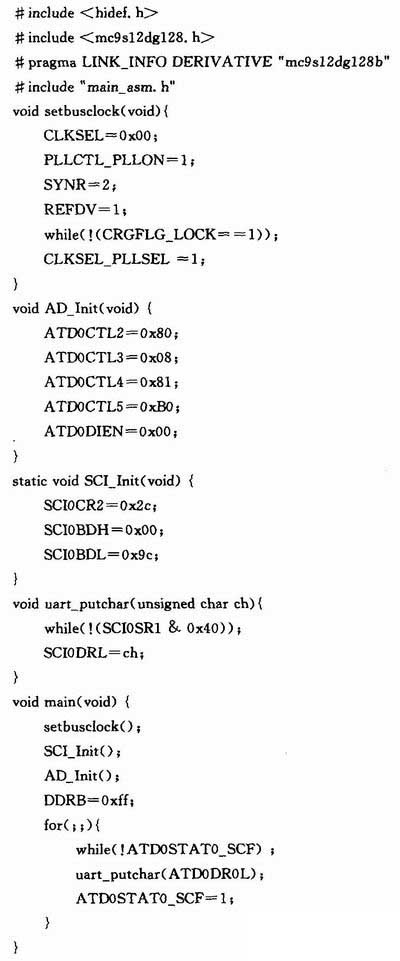
实验表明,该方法能够有效地在迷宫中进行距离的探测,最大探测距离达到20 cm,在1 cm处传感器饱和,而迷宫机器人的要求能够探测的最大距离为18 cm,饱和距离不能大于2 cm。显然,该电路完全满足使用要求。实验程序如下所示:
实验结果如图5所示,可见距离与A/D采样值成反比。
4 结论
本文设计了一款新型迷宫机器人,其中光电传感器的设计部分采用RPR220实现。实验表明,本设计的探测距离完全满足迷宫机器人的使用要求。其创新点是使用软件的方法进行干扰消除,有效地避免了阳光红外信号的干扰,提高了迷宫机器人走迷宫的成功率,机器人的可靠性也得到了大幅的提升。
Freescale 单片机 传感器 机器人 嵌入式 红外 半导体 二极管 LED 三极管 电路 电压 电流 电阻 相关文章:
- 基于图像识别的循迹车路径识别算法研究(03-30)
- 采用i.MX6实现机器人智能示教系统(03-16)
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 制作机器人常用传感器盘点(02-23)
- 基于混沌电路设计阵列触觉传感器的采集系统(03-01)
- 复杂路线下机器人的三点三轮寻迹系统(01-17)