一种新型玻窗清洁机器人的设计与实现
时间:09-08
来源:互联网
点击:
4 玻窗清洁机器人控制算法
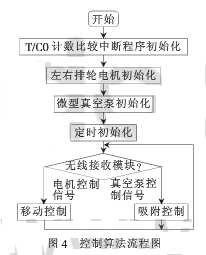
控制系统中由应用程序来实现控制任务,因此,应用程序设计的好坏直接决定了整个系统的控制质量和控制效率。图4为控制算法流程图。首先对控制系统的系统变量初始化、I/O口初始化、中断系统初始化、外围初始化等操作;然后通过无线接收模块nRF24L01接收来自手势识别系统发送来的控制信号,依靠SPI与单片机进行通信;最后,单片机将无线接收模块接收到的控制信号进行运算处理,产生控制左右电机的信号,并传送给驱动放大器,经放大后的控制信号直接驱动两个电机,实现机器人的全方位移动控制。
5 玻窗清洁机器人测试
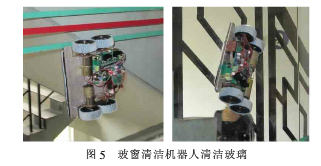
在实验室竖直玻璃上进行测试,玻璃面上涂有少许深色污渍。如图5所示,玻窗清洁机器人能很好地吸附在玻窗上,并能实现在竖直方向全方位自由移动。向上移动速度为7 cm/s,向下移动速度为14 cm/s,左右移动速度为10 cm/s,其他方向移动速度介于7~14 cm/s之间。实验表明,该机器人能很好地去除玻璃上的污渍,清洁效果良好。
针对目前高层住宅清洗玻璃时面临的操作繁琐、难度较大、危险较高等问题,本文介绍了一种新型玻窗清洁机器人,给出了玻窗清洁机器人的总体设计思路,重点阐述了玻窗清洁机器人的结构设计、驱动模块以及控制算法。实验表明,该玻窗清洁机器人可在竖直玻璃壁面全方位自由移动,避免了玻窗清洁带来的高空作业危险,而且操作简单、使用方便,有较高的可行性和准确性,具有重要的应用价值和广阔的市场前景。
来源:微型机与应用
控制系统中由应用程序来实现控制任务,因此,应用程序设计的好坏直接决定了整个系统的控制质量和控制效率。图4为控制算法流程图。首先对控制系统的系统变量初始化、I/O口初始化、中断系统初始化、外围初始化等操作;然后通过无线接收模块nRF24L01接收来自手势识别系统发送来的控制信号,依靠SPI与单片机进行通信;最后,单片机将无线接收模块接收到的控制信号进行运算处理,产生控制左右电机的信号,并传送给驱动放大器,经放大后的控制信号直接驱动两个电机,实现机器人的全方位移动控制。
5 玻窗清洁机器人测试
在实验室竖直玻璃上进行测试,玻璃面上涂有少许深色污渍。如图5所示,玻窗清洁机器人能很好地吸附在玻窗上,并能实现在竖直方向全方位自由移动。向上移动速度为7 cm/s,向下移动速度为14 cm/s,左右移动速度为10 cm/s,其他方向移动速度介于7~14 cm/s之间。实验表明,该机器人能很好地去除玻璃上的污渍,清洁效果良好。
针对目前高层住宅清洗玻璃时面临的操作繁琐、难度较大、危险较高等问题,本文介绍了一种新型玻窗清洁机器人,给出了玻窗清洁机器人的总体设计思路,重点阐述了玻窗清洁机器人的结构设计、驱动模块以及控制算法。实验表明,该玻窗清洁机器人可在竖直玻璃壁面全方位自由移动,避免了玻窗清洁带来的高空作业危险,而且操作简单、使用方便,有较高的可行性和准确性,具有重要的应用价值和广阔的市场前景。
来源:微型机与应用
机器人 传感器 单片机 电路 步进电机 电压 电流 电动机 PWM 放大器 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)