基于SMP 运动控制内核的机器人控制系统
时间:12-25
来源:互联网
点击:
4.2 示教操作界面
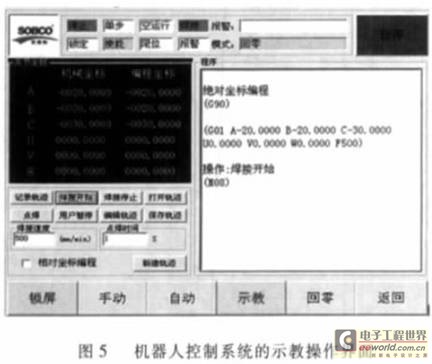
手动示教模式的功能是让操作人员记录机器人位置姿态并生成焊接轨迹。在机器人的实际应用中, 需要操作人员在手动操作模式下移动机器人关节使焊枪末端始终沿着规定的焊接轨迹移动, 然后在示教模式下记录运动过程中的关键位置点, 并根据焊接的要求插入打开焊枪、关闭焊枪、输入焊接速度、暂停等功能指令, 最后保存轨迹生成可再现的示教程序[4]。程序中对焊枪的控制是将M 指令进行译码后, 交给PLC 引擎运算, 并通过PLC 输出点控制焊枪的开始点和结束点。示教功能界面如图5 所示。在自动运行界面下, 操作者可重复调用保存好的示教轨迹程序, 控制机器人运动, 完成焊接。
5 结束语
本文介绍的基于PC 机和Windows 系统的机器人控制系统具有运行稳定、系统内核升级方便、应用软件开发周期短、界面友好等优点。本系统实现了对6 个自由度机器人的联动控制, 完成了示教编程、参数设定, 自动运行等功能模块的编程。搭配松下A4N 系列伺服和广东伺博科NBC-350 二氧化碳气保焊机, 在实际的焊接应用中取得了良好的效果。通过对焊接速度和焊接电流, 电压等参数的调节, 焊接质量达到了技术要求, 轨迹准确, 焊缝平滑。接下去, 机器人系统的进一步研究工作将主要在以下两个方面:
(1) 深入研究机器人运动的速度前馈和加减速算法,提高机器人在高速运动下的定位精度, 减少振动, 保证机器人运动的平稳性;
(2) 建立机器人三维模型, 研究机器人逆运动学算法, 规划机器人的空间运动轨迹, 编写离线编程加工程序。
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)