配视觉系统的直角坐标机器人的应用实例
时间:12-09
来源:互联网
点击:
2 印刷品质量检验
这里的任务是图2产品的检验。在图2中被检验的产品是透明塑料上的文字。机器人首先停止传送带,并匀速移动检测头,识别系统在几个特定的位置自动检测识别所印文字和符号。塑料再起动一定长度,机器人反向运动,检测系统开始该行产品的自动检验识别。
机器人是德国百格拉公司单轴机器人,由于负载小及移动速度要求不高,故选用型号为LM-P404 R-AT5,有效行程按任务要求选为1500毫米,驱动电机是百格拉公司的步进电机VRDM3910LWB,机器人控制系统选用百格拉公司的专用工控机TLCC。TLCC通过CAN总线控制TLC611步进电机驱动器。图像处理系统选用德国Vision Experts公司的检测系统 VE 4000 OCV/2。图2是该系统在实际使用中的照片。
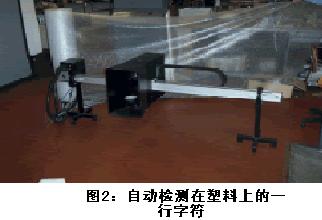
德国Vision Experts公司的E 4000 OCV/2系统由智能CCD摄像机VC2038和专利识别软件组成,可以检测各种符号,如:印刷的符号、喷码符号、热转印、激光雕刻等。可以100%保证发现所有下面的问题:整个或部分字符漏印,不完整字符,不同字符间混乱,如5和6、6和9印混了,字符位置不对,字符的字体不对或不一致。该系统可以识别多种符号,当图像中要识别的符号与背景的对比度有些变化,如照明系统出了问题,甚至图像背景里有某种规则的纹理时,该系统也可以很好地工作。该系统也非常灵活,可以一分钟仅检测10个产品,也可以一小时检测10万个产品;可以同时检测300个字符,也可以检测同时含10种字体的符号集合。被检测产品可以被旋转,实现在运动中实时动态检测,E 4000 OCV/2系统自动给出检测数据,有自检和外部信号启动公式,检测的符号可以缩小或放大,给出符号的位置数据。
不仅塑料检测如此,其它方面如印刷品、木材、PS板等方面都采用类似的方法进行检测。
3 工件识别定位及抓取
随着自动化生产能力的提高,现代工厂中经常会出现需要分类分拣的场合,那么就非常需要配合视觉系统的机器人来实现这项工作。该例子为对仓库中不同批次的产品进行定位及抓取。在机器启动前,操作人员根据具体需求,通过计算机将需要搬运的产品的批次传输给视觉系统,当机器人带动视觉系统到达产品上方时,视觉系统通过获取的图像进行识别,通常识别物为条码,当确认该产品为需要搬运的产品,那么视觉系统再通过获取的图像进行精确定位,将坐标值传输给机器人,机器人随后运动到指定位置,进行抓取搬运。如果检测该产品不是需要搬运的产品,那么传输给机器人相应的信号,机器人移动到下一工件位置进行下一次检测。

该系统中的视觉系统同样采用德国Vision Components公司智能摄像机VC2038,机器人采用德国百格拉直角坐标机器人,控制系统采用的为德国MOVTEC公司运动控制卡,这样能够保证在一台计算机中对视觉系统与直角坐标机器人的控制与配合。
目前,类似系统已经在很多自动化流水线上应用,均获得很好的效果。
4 视觉系统引导的灌装机械
目前机器人已经应用到了各个领域,以下我们介绍机器人在灌装机械中的使用。如图4所示,在一些工厂中需要对液态产品大量的进行灌装以方便运输,所以自然就增加了对灌装机的需求,附图中为视觉引导的直角坐标机器人在灌装机中的应用。机器人方面选用德国百格拉龙门式三维直角坐标机器人,视觉方面选择德国Vision Components公司智能摄像机VC4038E。

该系统是通过BLOB区域分析的方法来进行桶口的位置确定。由于每个桶口的正上面都有一个与铁桶本身颜色区分明显的白点和黑洞,那么视觉系统就采用区域分析的方法对采集的图像进行处理,获得该白点和的黑洞位置,然后通过换算确定桶口的位置,并通过以太网口传输给直角坐标机器人。机器人获得该坐标后,直接带动注油管道到桶口上方,然后插入,注油,待结束后重复执行以上的动作。
该系统成功的解决了工厂注油难,费时,费力等困难,大大提高了工作效率,使其在几个月内便收回了该设备的成本。该类应用可以推广到其它产品或其它形状的灌装容器应用中。这里面机器人的运动轴要带金属防护带,所用的驱动电机是防爆电机。
五 结论及展望
本文介绍了德国百格拉公司的直角坐标机器人及德国Vision Components公司的智能相机。德国Vision Components公司的智能相机装配在百格拉公司的直角坐标机器人上已经被众多用户成功地用在工件定位,分类搬运上。 随着大批量自动化生产的迅猛发展,很多产品要在许多生产环节全面被检测及精确定位,这类直角坐标机器人和图像处理系统将具有更加广范的市场前景和发展潜力!
这里的任务是图2产品的检验。在图2中被检验的产品是透明塑料上的文字。机器人首先停止传送带,并匀速移动检测头,识别系统在几个特定的位置自动检测识别所印文字和符号。塑料再起动一定长度,机器人反向运动,检测系统开始该行产品的自动检验识别。
机器人是德国百格拉公司单轴机器人,由于负载小及移动速度要求不高,故选用型号为LM-P404 R-AT5,有效行程按任务要求选为1500毫米,驱动电机是百格拉公司的步进电机VRDM3910LWB,机器人控制系统选用百格拉公司的专用工控机TLCC。TLCC通过CAN总线控制TLC611步进电机驱动器。图像处理系统选用德国Vision Experts公司的检测系统 VE 4000 OCV/2。图2是该系统在实际使用中的照片。
德国Vision Experts公司的E 4000 OCV/2系统由智能CCD摄像机VC2038和专利识别软件组成,可以检测各种符号,如:印刷的符号、喷码符号、热转印、激光雕刻等。可以100%保证发现所有下面的问题:整个或部分字符漏印,不完整字符,不同字符间混乱,如5和6、6和9印混了,字符位置不对,字符的字体不对或不一致。该系统可以识别多种符号,当图像中要识别的符号与背景的对比度有些变化,如照明系统出了问题,甚至图像背景里有某种规则的纹理时,该系统也可以很好地工作。该系统也非常灵活,可以一分钟仅检测10个产品,也可以一小时检测10万个产品;可以同时检测300个字符,也可以检测同时含10种字体的符号集合。被检测产品可以被旋转,实现在运动中实时动态检测,E 4000 OCV/2系统自动给出检测数据,有自检和外部信号启动公式,检测的符号可以缩小或放大,给出符号的位置数据。
不仅塑料检测如此,其它方面如印刷品、木材、PS板等方面都采用类似的方法进行检测。
3 工件识别定位及抓取
随着自动化生产能力的提高,现代工厂中经常会出现需要分类分拣的场合,那么就非常需要配合视觉系统的机器人来实现这项工作。该例子为对仓库中不同批次的产品进行定位及抓取。在机器启动前,操作人员根据具体需求,通过计算机将需要搬运的产品的批次传输给视觉系统,当机器人带动视觉系统到达产品上方时,视觉系统通过获取的图像进行识别,通常识别物为条码,当确认该产品为需要搬运的产品,那么视觉系统再通过获取的图像进行精确定位,将坐标值传输给机器人,机器人随后运动到指定位置,进行抓取搬运。如果检测该产品不是需要搬运的产品,那么传输给机器人相应的信号,机器人移动到下一工件位置进行下一次检测。
该系统中的视觉系统同样采用德国Vision Components公司智能摄像机VC2038,机器人采用德国百格拉直角坐标机器人,控制系统采用的为德国MOVTEC公司运动控制卡,这样能够保证在一台计算机中对视觉系统与直角坐标机器人的控制与配合。
目前,类似系统已经在很多自动化流水线上应用,均获得很好的效果。
4 视觉系统引导的灌装机械
目前机器人已经应用到了各个领域,以下我们介绍机器人在灌装机械中的使用。如图4所示,在一些工厂中需要对液态产品大量的进行灌装以方便运输,所以自然就增加了对灌装机的需求,附图中为视觉引导的直角坐标机器人在灌装机中的应用。机器人方面选用德国百格拉龙门式三维直角坐标机器人,视觉方面选择德国Vision Components公司智能摄像机VC4038E。
该系统是通过BLOB区域分析的方法来进行桶口的位置确定。由于每个桶口的正上面都有一个与铁桶本身颜色区分明显的白点和黑洞,那么视觉系统就采用区域分析的方法对采集的图像进行处理,获得该白点和的黑洞位置,然后通过换算确定桶口的位置,并通过以太网口传输给直角坐标机器人。机器人获得该坐标后,直接带动注油管道到桶口上方,然后插入,注油,待结束后重复执行以上的动作。
该系统成功的解决了工厂注油难,费时,费力等困难,大大提高了工作效率,使其在几个月内便收回了该设备的成本。该类应用可以推广到其它产品或其它形状的灌装容器应用中。这里面机器人的运动轴要带金属防护带,所用的驱动电机是防爆电机。
五 结论及展望
本文介绍了德国百格拉公司的直角坐标机器人及德国Vision Components公司的智能相机。德国Vision Components公司的智能相机装配在百格拉公司的直角坐标机器人上已经被众多用户成功地用在工件定位,分类搬运上。 随着大批量自动化生产的迅猛发展,很多产品要在许多生产环节全面被检测及精确定位,这类直角坐标机器人和图像处理系统将具有更加广范的市场前景和发展潜力!
机器人 自动化 机器视觉 传感器 DSP C语言 步进电机 MIPS 总线 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)