基于机器视觉的智能导览机器人控制系统设计
时间:11-21
来源:互联网
点击:
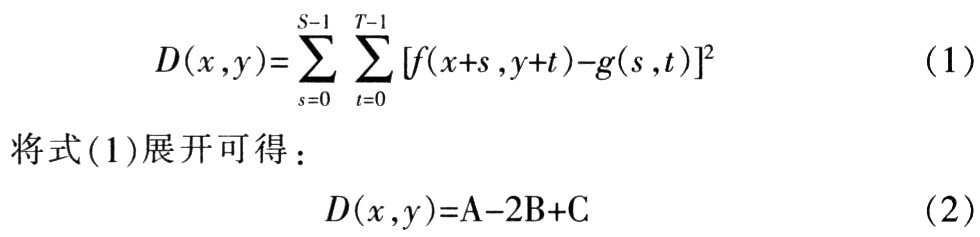
根据图4,系统通过hough变换检测两条直线的位置,测出图像的两条边缘线离两端的像素大小,再根据实际地面距离进行标定,便可获知机器人所在位置。
4.2 模板匹配算法
模板匹配技术是图像目标识别技术中一个重要的研究方向,具有算法简单、计算量小以及识别率高等特点,目前在目标识别领域得到广泛应用。它是用一个较小的图像,将模板与源图像相比较,确定在源图像中是否存在与该模板相同或相似的区域,若该区域存在,可确定其位置并提取该区域。它常采用模板与源图像对应区域的误差平方和作为测度。
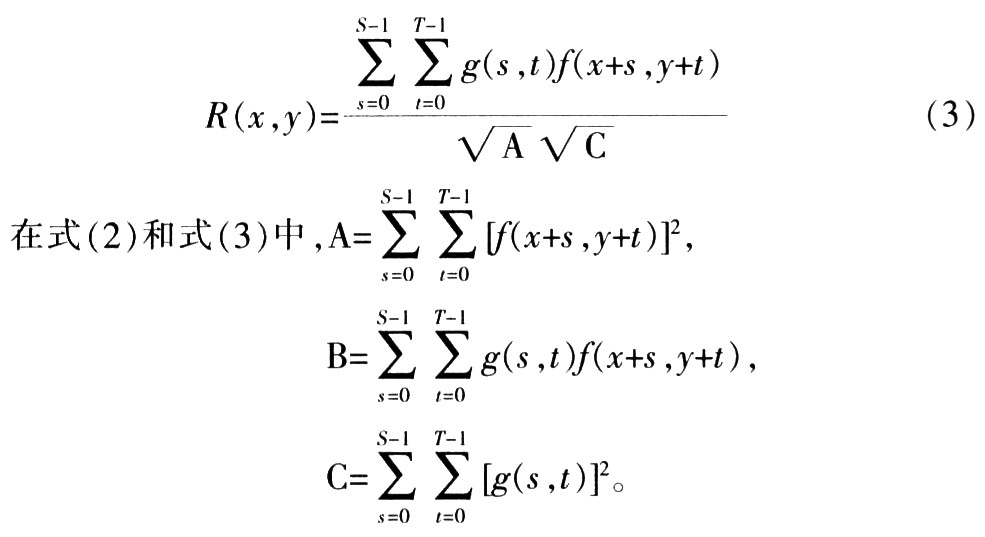
设f(x,y)为MxN的源图像,g(s,t)为SxT(s≤M,T≤N)的模板图像,则误差平方和测度定义为:
当A为常数时,则可用2B相匹配,当D(x,y)取得最大值时,便认为模板与图像相匹配。通常假设A为常数时会产生误差。严重时将无法正确匹配,因此可用归一化互相关作为误差平方和测度,定义为:
4.3 模板匹配改进算法
但是按模板匹配算法求匹配计算工作量非常大,考虑到相关是卷积的一种特定形式以及 Matlab计算功能的强大,采用FFT方法,在频域中计算后再进行逆变换即可求出。图像和定位模板图像旋转180°的傅里叶变换后作点乘运算,再求其逆 FFT变换并返回空间域值也就相当于相关运算。在求取空间域值的最大值后,再根据最大值选取合适的阈值,便可确定目标点的位置。实验中在模板匹配成功后,可将目标和背景颜色二值化,并用红色“十”字符号标记,不断更新数据信息。将停靠点设定在自己期望的像素位置(如图像的中心位置偏下),然后自动调整机器人位置,设计成如图5形式,可知机器人需要向右行驶。
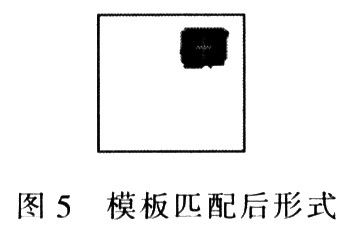
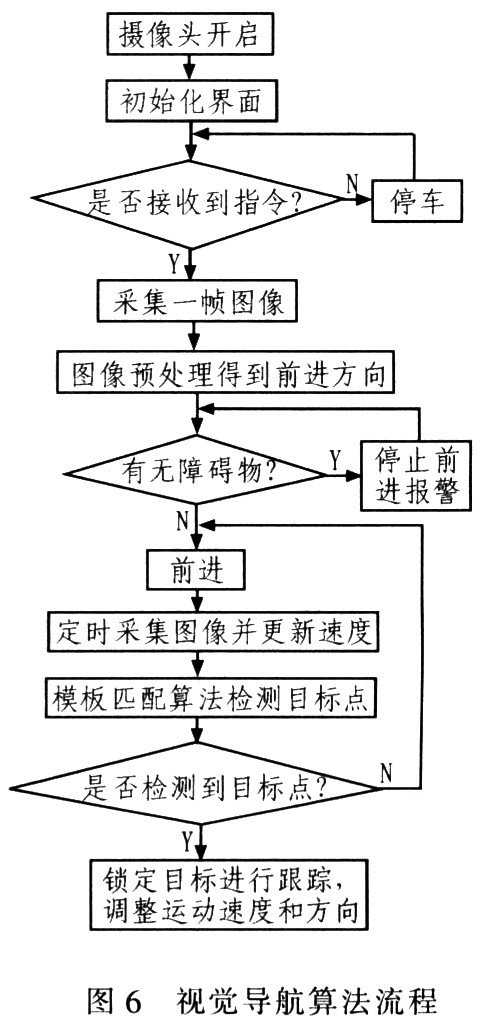
图6为视觉导航算法流程。
5 实验结果与结论
基于以上设计,对进行机器人运动控制和路径规划进行实验。实验分别采用Matlab语言进行图像仿真,能够自动选择合适的阈值分割,并得到较好的边缘检测,然而在实验中有时会因为光照强度或其他因素影响,在进行阈值分割时不能达到理想效果,在 VC环境下能够控制机器人运动,模板匹配取得较好效果,后续将着重在Visual C++6.0环境进行图像处理方法研究。这样可以更好控制机器人运动。总之,该系统设计可使机器人能够在复杂多变的环境下准确识别图像信息,并做出正确决策,完成所需动作,从而实现既定目标。
机器人 C语言 USB 传感器 红外 电子 陀螺仪 ARM 总线 电压 编码器 仿真 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)