基于TMS32OF2812 DSP的双足机器人样机设计
时间:11-30
来源:互联网
点击:
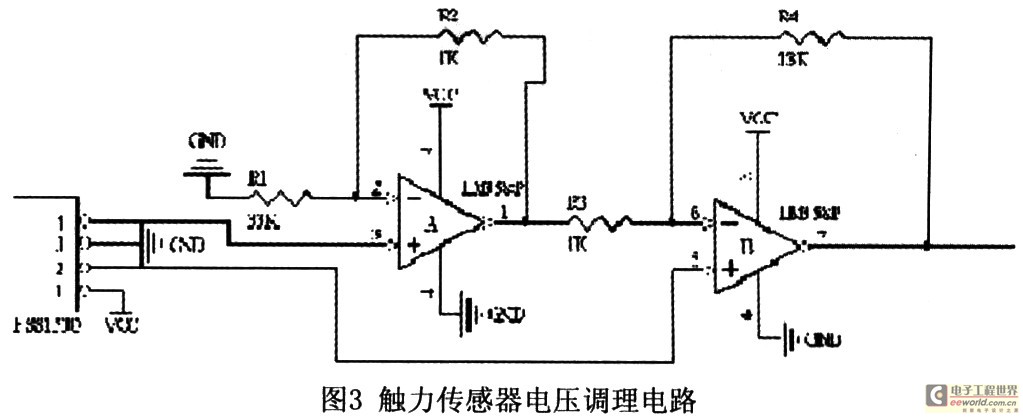
在经过调理电路放大以后,传感器的电平输出被放大到0—3V之间,可直接连到F2812的A/D转换电路。
躯干的角速度包括滚转、俯仰和偏航三个方向的分量,一般需要关注的是滚转和俯仰方向的分量,即机器人是否会朝前后或左右方向摔倒。我们选择ADI公司的微机械陀螺仪ADXRSl50,其参数如表3所示。
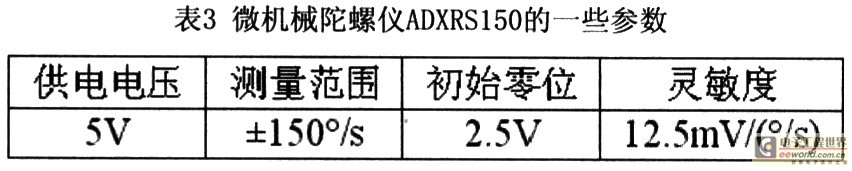
陀螺仪ADXRSl50具有Z一轴响应、工作频带宽、小而轻等特点,能够满足机器人双足行走过程中检测躯干实时角速度的要求。
为了方便地控制机器人动作,我们选用了红外线遥控方式。选用集红外线接收和放大于一体的HS0038芯片作为红外线接收器,其中载波频率为38kHz;电路中将HS0038芯片的输出信号接到F2812事件管理器EVB的捕获引脚上,通过捕获中断服务子程序来对遥控器的信号进行接收和解码,然后查表来确定相应的按键,执行相应的动作。
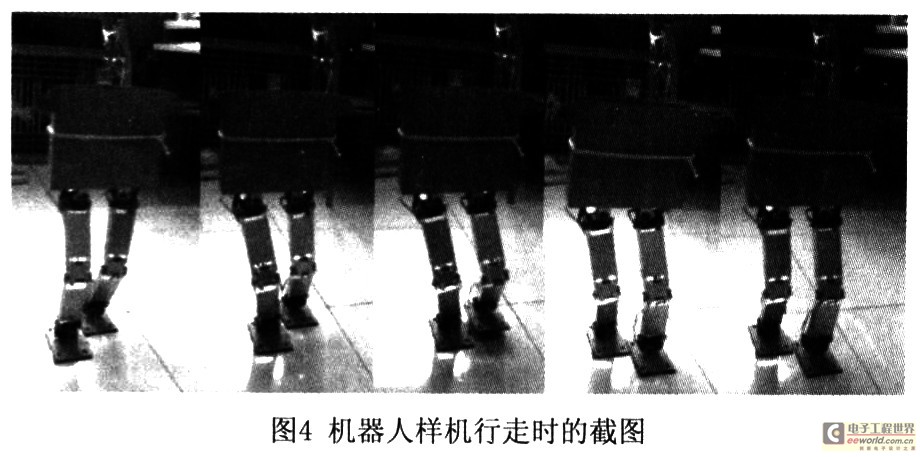
4 行走试验
通过在主控芯片中的步态规划,双足机器人在行走过程中的重心投影一直在支撑区域以内,试验在平整地面上进行,用7.4V的锂电池给双足机器人提供动力,机器人独立于上位机,用红外遥控器控制他的行为。在行走实验中,机器人收到指令后执行的一系列动作如下:
(1)双腿弯曲,降低重心到一定高度;
(2)身体左倾,重心投影移到左脚,抬右腿;
(3)右腿前伸,沿设定轨迹着地;
(4)身体右倾,将重心投影转移到右脚;
(5)检测最近收到的指令,若为停止命令,则以右腿为支撑腿,收左腿,回到直立状态,否则执行下一个的动作;
(6)左腿前伸,沿设定轨迹着地;
(7)身体左倾,将重心投影转移到左脚上;
(8)检测最近收到的指令,若为停止命令,则以左腿为支撑腿,收右腿,回到立正状态,否则执行第3个的动作。
行走时各杆件运动的速度和加速度不能太大,运动速度会比较慢。经过多次试验和研究发现,如果摆动腿移动得太慢,会增加单腿支撑的时间,若摆动腿移动得过快,会增加对身体的作用力,使机器人稳定性变差,比较容易摔倒;在双腿支撑期,质心投影由一只脚上转移到另一只脚上,为了不让两脚相对地面滑动,必须较好地保持两脚的相对位置和相对姿态不变,因此在这一过程中各个关节也不能转得太快,而且摆动脚着地时会受到地面的冲击力,使机器人的身体有些晃动,双腿支撑期稍微长一些能起到缓冲作用。经过多次调整和试验,发现在取双腿支撑期2.5s、单腿支撑期1.5s时,可以得到比较稳定的前向行走。
4 结束语
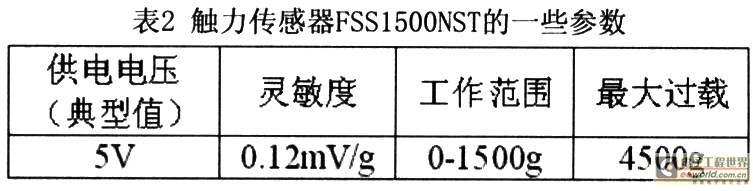
本文根据研究双足机器人行走的需要,选择大扭矩舵机作为各关节的驱动电机,设计实现了十自由度的小型双足机器人:以TI公司TMS320F2812 DSP作为主控芯片,为方便程序的调试,采用了JZ864微功率无线数据传输模块来传递上位机与机器人之间的信息。选择触力传感器FSSl500NST、微机械陀螺仪ADXRSl50来分别测量脚底板和地面接触信息以及躯干的角速度,采用了红外遥控的方式来控制机器人的行为,最后设计出机器人的整体控制系统并实现了稳定行走。
机器人 传感器 DSP 电路 陀螺仪 总线 电压 电阻 ADI 红外 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)