双轮移动式自平衡机器人的控制系统设计
时间:11-18
来源:互联网
点击:
4 实 验
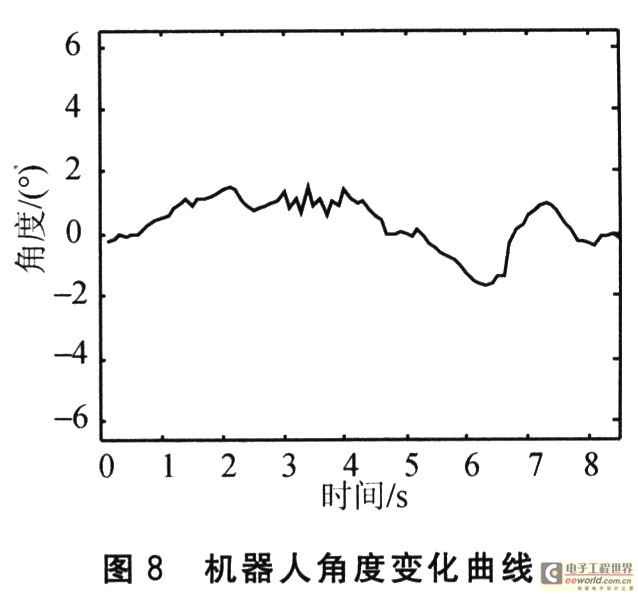
利用该控制方法,对原理样机进行了多次实验。实验中,在机器人正上方水平位置安装陀螺仪,以采集机器人的倾倒角度数据。实际测量角度信息随时间变化的曲线如图8所示。通过测得数据分析可以看到,机器人大致可以稳定在0°附近,最大偏差为±2°。
结 语
本文设计了以ATmage128单片机为控制核心,采用红外测距传感器监控的双轮自平衡机器人,并搭建实验平台进行了控制试验。实验结果表明,该机器人可以通过有效的控制保持在竖直状态,并且在一定的角度范围内达到平衡。
利用该控制方法,对原理样机进行了多次实验。实验中,在机器人正上方水平位置安装陀螺仪,以采集机器人的倾倒角度数据。实际测量角度信息随时间变化的曲线如图8所示。通过测得数据分析可以看到,机器人大致可以稳定在0°附近,最大偏差为±2°。
结 语
本文设计了以ATmage128单片机为控制核心,采用红外测距传感器监控的双轮自平衡机器人,并搭建实验平台进行了控制试验。实验结果表明,该机器人可以通过有效的控制保持在竖直状态,并且在一定的角度范围内达到平衡。
机器人 传感器 电压 红外 单片机 总线 Atmel CMOS ADC 电路 放大器 电阻 CAN总线 陀螺仪 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)