移动机器人的多传感器测距系统设计
时间:10-28
来源:互联网
点击:
(三)红外传感器电路
凌阳单片机的I/O0~I/O6可作为10位A/D转换器。本系统中,凌阳单片机的I/O0~I/O2口作为A/D转换器使用,I/O6~I/O8接三路红外发射电路,I/O0~I/O2接三路红外接收电路。单片机I/O口输出高电平时与红外发光管TLN205导通,发射红外光;光波在遇到障碍物后反射,被红外接收管TPS708接收,产生一个与光强相对应的电流,电流经LM358组成的两级放大电路放大后,输出一个0~3V的模拟电压,经A/D口输人单片机。单片机通过 电压的大小计算、判断障碍物的距离。
四、软件设计
单片机SPCE061 A选用系统时钟频率fosc=20.480MHz,CPU时钟频率(CPUCLK)为fosc/2=10. 24 MHz,时钟源A选用频率32768 Hz,时钟源B选用频率1 Hz,,SPCE061A提供2个16位的定时/计数器:TimerA和TimerB。TimerA的时钟源由时钟源A和时钟源B进行与操作形成;TimerB的时钟源仅为时钟源A。
40 kHz的超声波脉冲为高低电平各占12.5μs的方波,CPU时钟计数延迟123个指令周期即为12.5μs。单片机通过不断的交替产生12.5μs的高低电平即可产生40 kHz的脉冲信号,每次发射20个脉冲的脉冲群,持续0.5 ms,脉冲发射、间隔时间至少20 ms,从I/O口输出。系统选用定时器A作为产生20 ms的定时中断,选用定时器B作为超声波计数器。
由于超声波传感器存在测量盲区,因而,在程序设计中,将远于30 cm的测距由超声波传感器完成,30 cm以内由红外传感器完成。
红外测距过程中,选用定时器A产生0.1S的中断进行A/D采样,并将采样的电压值转换为距离信息。
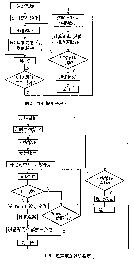
主程序中,首先,进入红外探测子程序,如果探测到障碍物,则进人数据传输、显示及运动控制子程序;没有探测到障碍物,则进入超声波探测子程序。超声波探测到障碍物,则进人数据传输、显示及运动控制子程序,没有探测到障碍物,则循环进行红外探测。图2、图3分别为红外及超声波探测子程序。
五、测量结果
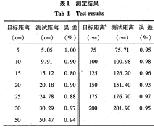
试验过程中,采用同大小、质地、颜色的障碍物进行测量。试验表明:系统在0~200 cm的范围间测距精度在1%之内,能够较为准确对障碍物进行测距。在30 cm以内的测距由红外传感器完成,30~200 cm之间的测距由超声波传感器完成,试验结果见表1。
六、结束语
本文研究了一种低成本、低功耗、高效能的移动机器人侧距系统,采用超声波和红外传感器的多传感器系统,有效地解决了单一传感器测距系统中测量盲区的缺陷问题;并且,采用3组传感器组装配在机器人的3个不同位置,使得机器人可完成3个不同方位的测距任务。
凌阳单片机的I/O0~I/O6可作为10位A/D转换器。本系统中,凌阳单片机的I/O0~I/O2口作为A/D转换器使用,I/O6~I/O8接三路红外发射电路,I/O0~I/O2接三路红外接收电路。单片机I/O口输出高电平时与红外发光管TLN205导通,发射红外光;光波在遇到障碍物后反射,被红外接收管TPS708接收,产生一个与光强相对应的电流,电流经LM358组成的两级放大电路放大后,输出一个0~3V的模拟电压,经A/D口输人单片机。单片机通过 电压的大小计算、判断障碍物的距离。
四、软件设计
单片机SPCE061 A选用系统时钟频率fosc=20.480MHz,CPU时钟频率(CPUCLK)为fosc/2=10. 24 MHz,时钟源A选用频率32768 Hz,时钟源B选用频率1 Hz,,SPCE061A提供2个16位的定时/计数器:TimerA和TimerB。TimerA的时钟源由时钟源A和时钟源B进行与操作形成;TimerB的时钟源仅为时钟源A。
40 kHz的超声波脉冲为高低电平各占12.5μs的方波,CPU时钟计数延迟123个指令周期即为12.5μs。单片机通过不断的交替产生12.5μs的高低电平即可产生40 kHz的脉冲信号,每次发射20个脉冲的脉冲群,持续0.5 ms,脉冲发射、间隔时间至少20 ms,从I/O口输出。系统选用定时器A作为产生20 ms的定时中断,选用定时器B作为超声波计数器。
由于超声波传感器存在测量盲区,因而,在程序设计中,将远于30 cm的测距由超声波传感器完成,30 cm以内由红外传感器完成。
红外测距过程中,选用定时器A产生0.1S的中断进行A/D采样,并将采样的电压值转换为距离信息。
主程序中,首先,进入红外探测子程序,如果探测到障碍物,则进人数据传输、显示及运动控制子程序;没有探测到障碍物,则进入超声波探测子程序。超声波探测到障碍物,则进人数据传输、显示及运动控制子程序,没有探测到障碍物,则循环进行红外探测。图2、图3分别为红外及超声波探测子程序。
五、测量结果
试验过程中,采用同大小、质地、颜色的障碍物进行测量。试验表明:系统在0~200 cm的范围间测距精度在1%之内,能够较为准确对障碍物进行测距。在30 cm以内的测距由红外传感器完成,30~200 cm之间的测距由超声波传感器完成,试验结果见表1。
六、结束语
本文研究了一种低成本、低功耗、高效能的移动机器人侧距系统,采用超声波和红外传感器的多传感器系统,有效地解决了单一传感器测距系统中测量盲区的缺陷问题;并且,采用3组传感器组装配在机器人的3个不同位置,使得机器人可完成3个不同方位的测距任务。
机器人 传感器 红外 电路 射频 单片机 LED 电流 电压 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)