基于RTX51的排爆机器人嵌入式控制器固件开发
时间:08-30
来源:互联网
点击:
2.1 RTX51简介
RTX51是德国Keil公司开发的一种应用于MCS51系列单片机功能强大的、可用于目前世界上所有由Intel 8051标准内核派生出的350多种增强微控制器的实时操作系统。使用RTX51可实现程序按时间片轮转和抢先的任务调度,并且支持事件和信号驱动。
RTX51有两个版本:RTX51Full和RTX51Tiny。RTX51Full允许4个优先权任务的循环和切换,并且能够并行地利用中断功能。RTX51Full可以从内存池中申请和释放内存,同时可以强制一个任务停止执行等待一个中断,或者是其它中断传来的信号量或者消息。RTX51Tiny短小精悍,是RTX51Full的一个子集,只占用900字节ROM、7字节DATA型及3倍于任务数量的IDATA型RAM空间,可以很容易地运行在没有扩展外部存储器的单片机系统上。使用RTX51Tiny的程序可以访问外部存储器,允许循环任务切换,并且支持信号传递,还能并行地利用中断功能。RTX51Tiny 允许“准并行”同时执行几个任务。每一个任务在预先定义好的时间片内得以执行。时间到使正在执行的任务挂起,并使另一个任务开始执行。最新的RTX51Tiny2.0重新调整了内核结构,使用更灵活、执行更快、占用的资源更少,另外还增加了几个新的特性。
RTX51Tiny内核完全集成在Keil C51编译器中,以系统函数调用的方式运行,因此可以很容易地使用Keil C51语言编写和编译一个多任务程序,并嵌入到实际应用系统中。内核主要提供以下函数供应用程序引用,见表1。

RTX51Tiny的用户任务具有表2所列的几个状态,它们如图4所示进行切换。
为了保证任务在执行顺序上的协调,必须采用同步机制。内核用以下事件进行任务间的通信和同步:
(1)SIGNAL:用于任务之间通讯的位,可以用系统函数进行置位或清除。如果一个任务调用了os_wait函数等待SIGNAL而SIGNAL未置位,则该任务被挂起直到SIGNAL置位,才返回到READY状态,并可被再次执行。
(2)TIMEOUT:由os_wait函数开始的时间延时,其持续时间可由定时节拍数确定。带有TIMEOUT值调用os_wait函数的任务将被挂起,直到延时结束,才返回到READY状态,并可被再次执行。
(3)INTERVAL:由os_wait函数开始的时间间隔,其持续时间可由定时节拍数确定。带有INTERVAL值调用os_wait函数的任务将被挂起,直到间隔时间结束,才返回到READY状态,并可被再次执行。与TIMEOUT不同的是,任务的节拍计数器不复位。
RTX51Tiny采用微控制器(51)内部定时器T0来产生定时节拍,各任务只在各自分配的定时节拍数(时间片)内执行。当时间片用完后,切换至下一任务运行,因此各任务是并发执行的。RTX51Tiny调度程序定义这些任务按照下面的规则运行:
(1)如果出现以下情况,当前运行任务中断: ①任务调用os_wait函数并且指定事件没有发生。 ②任务运行时间超过定义的时间片轮转超时时间。
(2)如果出现以下情况,则开始另一个任务: ①没有其他的任务运行。 ②将要开始的任务处READY或TIME-OUT状态。
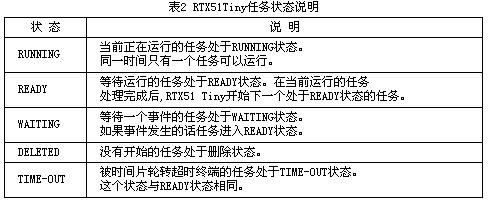
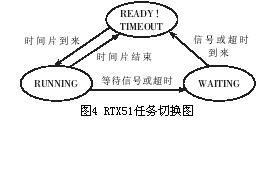
图4 RTX51任务切换图
2.2 嵌入式操作系统的特殊问题处理
在RTX51 下进行多任务编程与传统的顺序循环单任务编程相比有以下几个值得注意的不同点:
(1)多任务编程CPU 是轮流执行每个任务,可以将每个任务设计成死循环的模式,不断重复地进行数据计算或者访问硬件,不会影响别的任务的执行。当一个任务的数据计算完成后,可以通过os_wait 函数将CPU 交出执行别的任务。而单任务模式却独占了所有的CPU 资源,时常要担心是否执行时间太长而不能及时响应外部的异步事件。
(2)多任务编程有一个缺点,即资源冲突和重入问题。所谓资源冲突就是任务A在访问某个资源时,恰好发生了任务切换,任务B也访问这个资源,且改变了它的状态,这样当再次执行任务A时就可能发生冲突或带来不确定性。而所谓重入是指假设任务A在运行某个函数,发生任务切换后,任务B也运行这个函数,这样就会破坏任务A执行这个函数的现场,从而可能导致任务A执行函数时结果不正确。这种问题尤其容易出现在串行接口器件的操作中,例如串口、串行的A/D、D/A器件等。
在本嵌入式机器人控制器开发过程中,采用这种处理办法:将对每个独立的硬件(例如串行通讯)进行操作的驱动程序段放在一个任务中,也就是说要想对某个设备资源进行操作,只有依靠执行相应的任务来实现。这样无论何时切换任务,都不会对任何独立的“外设”造成影响。这样做彻底避免了资源冲突和重入问题而且利于系统维护与升级。各个任务之间要实现通信,可以调用os_send_signal函数及全局变量。
在嵌入式控制系统开发中借鉴了Windows消息驱动的思想,使部分不需要始终执行的任务处于等待信号状态,这样它们不会占用资源。只有当需要进行相应处理时通过需要它们运行的任务发送给它们SIGNAL,它们才会进入RUNNING任务队列中,得到执行。相关的系统函数为:
os_wait (K_SIG, 0, 0); //等待信号
os_send_signal (Task_ID);//向Task_ID任务发送一个信号。
这样的处理,可以使微控制器在有限的资源下集中精力处理好耗时且重要的事情。
RTX51是德国Keil公司开发的一种应用于MCS51系列单片机功能强大的、可用于目前世界上所有由Intel 8051标准内核派生出的350多种增强微控制器的实时操作系统。使用RTX51可实现程序按时间片轮转和抢先的任务调度,并且支持事件和信号驱动。
RTX51有两个版本:RTX51Full和RTX51Tiny。RTX51Full允许4个优先权任务的循环和切换,并且能够并行地利用中断功能。RTX51Full可以从内存池中申请和释放内存,同时可以强制一个任务停止执行等待一个中断,或者是其它中断传来的信号量或者消息。RTX51Tiny短小精悍,是RTX51Full的一个子集,只占用900字节ROM、7字节DATA型及3倍于任务数量的IDATA型RAM空间,可以很容易地运行在没有扩展外部存储器的单片机系统上。使用RTX51Tiny的程序可以访问外部存储器,允许循环任务切换,并且支持信号传递,还能并行地利用中断功能。RTX51Tiny 允许“准并行”同时执行几个任务。每一个任务在预先定义好的时间片内得以执行。时间到使正在执行的任务挂起,并使另一个任务开始执行。最新的RTX51Tiny2.0重新调整了内核结构,使用更灵活、执行更快、占用的资源更少,另外还增加了几个新的特性。
RTX51Tiny内核完全集成在Keil C51编译器中,以系统函数调用的方式运行,因此可以很容易地使用Keil C51语言编写和编译一个多任务程序,并嵌入到实际应用系统中。内核主要提供以下函数供应用程序引用,见表1。
RTX51Tiny的用户任务具有表2所列的几个状态,它们如图4所示进行切换。
为了保证任务在执行顺序上的协调,必须采用同步机制。内核用以下事件进行任务间的通信和同步:
(1)SIGNAL:用于任务之间通讯的位,可以用系统函数进行置位或清除。如果一个任务调用了os_wait函数等待SIGNAL而SIGNAL未置位,则该任务被挂起直到SIGNAL置位,才返回到READY状态,并可被再次执行。
(2)TIMEOUT:由os_wait函数开始的时间延时,其持续时间可由定时节拍数确定。带有TIMEOUT值调用os_wait函数的任务将被挂起,直到延时结束,才返回到READY状态,并可被再次执行。
(3)INTERVAL:由os_wait函数开始的时间间隔,其持续时间可由定时节拍数确定。带有INTERVAL值调用os_wait函数的任务将被挂起,直到间隔时间结束,才返回到READY状态,并可被再次执行。与TIMEOUT不同的是,任务的节拍计数器不复位。
RTX51Tiny采用微控制器(51)内部定时器T0来产生定时节拍,各任务只在各自分配的定时节拍数(时间片)内执行。当时间片用完后,切换至下一任务运行,因此各任务是并发执行的。RTX51Tiny调度程序定义这些任务按照下面的规则运行:
(1)如果出现以下情况,当前运行任务中断: ①任务调用os_wait函数并且指定事件没有发生。 ②任务运行时间超过定义的时间片轮转超时时间。
(2)如果出现以下情况,则开始另一个任务: ①没有其他的任务运行。 ②将要开始的任务处READY或TIME-OUT状态。
图4 RTX51任务切换图
2.2 嵌入式操作系统的特殊问题处理
在RTX51 下进行多任务编程与传统的顺序循环单任务编程相比有以下几个值得注意的不同点:
(1)多任务编程CPU 是轮流执行每个任务,可以将每个任务设计成死循环的模式,不断重复地进行数据计算或者访问硬件,不会影响别的任务的执行。当一个任务的数据计算完成后,可以通过os_wait 函数将CPU 交出执行别的任务。而单任务模式却独占了所有的CPU 资源,时常要担心是否执行时间太长而不能及时响应外部的异步事件。
(2)多任务编程有一个缺点,即资源冲突和重入问题。所谓资源冲突就是任务A在访问某个资源时,恰好发生了任务切换,任务B也访问这个资源,且改变了它的状态,这样当再次执行任务A时就可能发生冲突或带来不确定性。而所谓重入是指假设任务A在运行某个函数,发生任务切换后,任务B也运行这个函数,这样就会破坏任务A执行这个函数的现场,从而可能导致任务A执行函数时结果不正确。这种问题尤其容易出现在串行接口器件的操作中,例如串口、串行的A/D、D/A器件等。
在本嵌入式机器人控制器开发过程中,采用这种处理办法:将对每个独立的硬件(例如串行通讯)进行操作的驱动程序段放在一个任务中,也就是说要想对某个设备资源进行操作,只有依靠执行相应的任务来实现。这样无论何时切换任务,都不会对任何独立的“外设”造成影响。这样做彻底避免了资源冲突和重入问题而且利于系统维护与升级。各个任务之间要实现通信,可以调用os_send_signal函数及全局变量。
在嵌入式控制系统开发中借鉴了Windows消息驱动的思想,使部分不需要始终执行的任务处于等待信号状态,这样它们不会占用资源。只有当需要进行相应处理时通过需要它们运行的任务发送给它们SIGNAL,它们才会进入RUNNING任务队列中,得到执行。相关的系统函数为:
os_wait (K_SIG, 0, 0); //等待信号
os_send_signal (Task_ID);//向Task_ID任务发送一个信号。
这样的处理,可以使微控制器在有限的资源下集中精力处理好耗时且重要的事情。
机器人 PLC 嵌入式 显示器 LED 电压 单片机 Keil 继电器 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)