基于DSP的半自主远程控制移动机器人系统
时间:09-03
来源:互联网
点击:
引 言
机器人技术融合丁机械、电于、传感器、计算机、人工智能等许多学科的理论与技术,是当今许多前沿领域技术的综合体。移动型机器人主要用于对一些危险和未知的地域进行探索,例如是探索外星地表、进行引爆地雷等都需要使用到移动型机器人。半自主远程控制移动机器人由于具有较强的活动能力、良好的可控性等特点,在工农业、国防等各个领域具有广泛的应用前景。在半自主远程控制移动机器人的控制操作中,需要人的参与。因此需要有一个人机交互通道,把人的指令传递给机器人执行,同时机器人也可以把采集到的现场信息反馈绐人。本文基于移动机器人原理,设计了两轮驱动半自主移动机器人的硬件系统,详细阐述了基于GPRS技术的远程控制器的设计与实现。
1 远程控制移动机器人系统组成
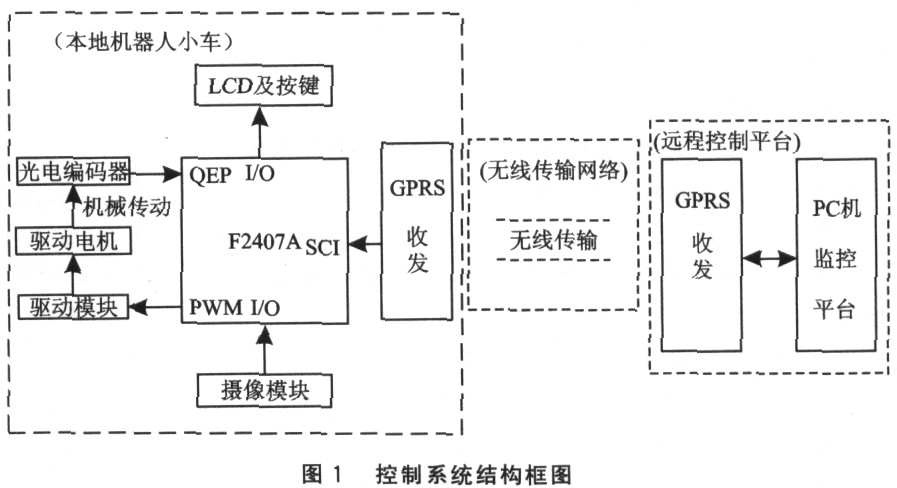
系统整体由远程控制平台、无线传输网络以及本地机器人小车三个大部分组成。DSP是本地机器人小车的控制核心。TI公司的TMS320LF2407A芯片具有改进的哈佛结构体系,采用了流水线技术等优点,而且采用
了高性能静态CMOS/技术,把芯片运行电压降低到3.3V,大大减少了芯片的功耗。其CPU具有很高酌处理速度,频率可以达到40 MHz,很多复杂的算法在系统控制中得以实施。此外,它还集成了32 KB闪存、16个脉宽调制(PWM)通道、1个CAN模块,以及1个超高速的500 ns的10位模数转换器(ADC)等功能强大的外设。
整个系统以F2407A为控制器的核心,扩展了机器人本体的人机接口(LCD显示及按键)模块、环境攝像模块、驱动电机模块、光电编码器反馈模块以及GPRS人机交互模块等。控制系统结构框图如图1所示。
1.1 机器人小车的定位模块
机器人定位模块主要由电机及其驱动电路、机械传动系统及光电编码器等组成。驱动轮和光电编码器之间采用齿轮传动,传动比为i,光电编码器的分辨率为N(即编码器每旋转一周输出的脉冲数),驱动轮的半径为r,则编码器每输出一个脉冲,对应的轮子在地面走过的距离为

电机控制采用脉宽调制(PWM)的调速方式,并以DSP自带的正交编码脉冲(QEP)电路采集光电编码器的反馈信息,对电机进行闭环PID控制。利用QEP电路捕捉光电编码器的反馈信号可以简化程序的编制,同时采用PID控制原理,可以提高系统的控制精度和稳定性。
电机驱动原理图如图2所示。驱动主芯片为L293B,L293B直流电机驱动芯片允许电压范围在4.5"36V,内有四重推挽(双重H桥集成功放电路)驱动电路,两个通道可以向各自的电机提供l A的驱动电流,并且如果芯片过热,芯片能够自动关断,保障系统不受损坏。当A向、B向为高电平时,则电机A、B电流分别由3脚流向6脚和11脚流向14脚,电机正转;反之,当A向、B向为低电平时,电机电流分别由6脚流向3脚和14脚流向11脚,电机反转。此时,可以用PWM控制芯片上电机使能脚的通断时间比来对电机进行调速,F2407A型DSP芯片支持PWM输出,因此可以很方便地对驱动电机进行调速。

由于DSP芯片自带有正交编码器捕捉模块,因此该部分的电路设计比较简单。光电编码器输出的正交脉冲信号经过非门加以稳定,进入DSP芯片的QEP电路被CPU捕获并识别,再将识别后的信息作为PID控制算法的反馈输入。
1.2 LCD显示及摄像模块
LCD显示模块和摄像模块的数据格式都是8位,与单片机等微控制器的接口灵活简单。攝像模块可以输出经压缩后的JPEG格式图像,因此数据量较小,减轻了控制器数据处理的负担,同时缩短了GPRS传输一帧图像的时间,实时性更好。F2407A提供了丰富的I/O接口,用I/O口可以很方便地对LCD模块和摄像模块进行数据的写入和读取。由于LCD模块的数据是写入的,而摄像模块的数据是读出的,因此可以分时复用同一组I/O口,而不会发生冲突。经设计,用不同的控制线分别控制这两个模块的使能端以实现分时复用,均用DSP的I/OPB0"I/OPB7作为它们的数据接口。
2 GPRS无线图像传输
GPRS(General Packet Radio Selvice)是一种基于包的无线通信服务。它是一种新的GSM数据业务,可以给移动用户提供无线分组数据接人服务。GPRS主要是给移动用户和远端的数据网络之间提供一种连接,从而给移动用户提供高速无线IP和无线X.25业务。
GPRS数据传输的优点是:
◇传输速率高;
◇实时在线;
◇按流量收费;
◇不受距离远近的影响;
◇快捷登录。
2.1 GPRS组网方式
在本系统中,利用GPRS移动通信网络实现信息的双向传输。机器人小车传给远程监控平台的数据主要包括现场图像信息和小车当前定位信息;
机器人技术融合丁机械、电于、传感器、计算机、人工智能等许多学科的理论与技术,是当今许多前沿领域技术的综合体。移动型机器人主要用于对一些危险和未知的地域进行探索,例如是探索外星地表、进行引爆地雷等都需要使用到移动型机器人。半自主远程控制移动机器人由于具有较强的活动能力、良好的可控性等特点,在工农业、国防等各个领域具有广泛的应用前景。在半自主远程控制移动机器人的控制操作中,需要人的参与。因此需要有一个人机交互通道,把人的指令传递给机器人执行,同时机器人也可以把采集到的现场信息反馈绐人。本文基于移动机器人原理,设计了两轮驱动半自主移动机器人的硬件系统,详细阐述了基于GPRS技术的远程控制器的设计与实现。
1 远程控制移动机器人系统组成
系统整体由远程控制平台、无线传输网络以及本地机器人小车三个大部分组成。DSP是本地机器人小车的控制核心。TI公司的TMS320LF2407A芯片具有改进的哈佛结构体系,采用了流水线技术等优点,而且采用
了高性能静态CMOS/技术,把芯片运行电压降低到3.3V,大大减少了芯片的功耗。其CPU具有很高酌处理速度,频率可以达到40 MHz,很多复杂的算法在系统控制中得以实施。此外,它还集成了32 KB闪存、16个脉宽调制(PWM)通道、1个CAN模块,以及1个超高速的500 ns的10位模数转换器(ADC)等功能强大的外设。
整个系统以F2407A为控制器的核心,扩展了机器人本体的人机接口(LCD显示及按键)模块、环境攝像模块、驱动电机模块、光电编码器反馈模块以及GPRS人机交互模块等。控制系统结构框图如图1所示。
1.1 机器人小车的定位模块
机器人定位模块主要由电机及其驱动电路、机械传动系统及光电编码器等组成。驱动轮和光电编码器之间采用齿轮传动,传动比为i,光电编码器的分辨率为N(即编码器每旋转一周输出的脉冲数),驱动轮的半径为r,则编码器每输出一个脉冲,对应的轮子在地面走过的距离为
电机控制采用脉宽调制(PWM)的调速方式,并以DSP自带的正交编码脉冲(QEP)电路采集光电编码器的反馈信息,对电机进行闭环PID控制。利用QEP电路捕捉光电编码器的反馈信号可以简化程序的编制,同时采用PID控制原理,可以提高系统的控制精度和稳定性。
电机驱动原理图如图2所示。驱动主芯片为L293B,L293B直流电机驱动芯片允许电压范围在4.5"36V,内有四重推挽(双重H桥集成功放电路)驱动电路,两个通道可以向各自的电机提供l A的驱动电流,并且如果芯片过热,芯片能够自动关断,保障系统不受损坏。当A向、B向为高电平时,则电机A、B电流分别由3脚流向6脚和11脚流向14脚,电机正转;反之,当A向、B向为低电平时,电机电流分别由6脚流向3脚和14脚流向11脚,电机反转。此时,可以用PWM控制芯片上电机使能脚的通断时间比来对电机进行调速,F2407A型DSP芯片支持PWM输出,因此可以很方便地对驱动电机进行调速。
由于DSP芯片自带有正交编码器捕捉模块,因此该部分的电路设计比较简单。光电编码器输出的正交脉冲信号经过非门加以稳定,进入DSP芯片的QEP电路被CPU捕获并识别,再将识别后的信息作为PID控制算法的反馈输入。
1.2 LCD显示及摄像模块
LCD显示模块和摄像模块的数据格式都是8位,与单片机等微控制器的接口灵活简单。攝像模块可以输出经压缩后的JPEG格式图像,因此数据量较小,减轻了控制器数据处理的负担,同时缩短了GPRS传输一帧图像的时间,实时性更好。F2407A提供了丰富的I/O接口,用I/O口可以很方便地对LCD模块和摄像模块进行数据的写入和读取。由于LCD模块的数据是写入的,而摄像模块的数据是读出的,因此可以分时复用同一组I/O口,而不会发生冲突。经设计,用不同的控制线分别控制这两个模块的使能端以实现分时复用,均用DSP的I/OPB0"I/OPB7作为它们的数据接口。
2 GPRS无线图像传输
GPRS(General Packet Radio Selvice)是一种基于包的无线通信服务。它是一种新的GSM数据业务,可以给移动用户提供无线分组数据接人服务。GPRS主要是给移动用户和远端的数据网络之间提供一种连接,从而给移动用户提供高速无线IP和无线X.25业务。
GPRS数据传输的优点是:
◇传输速率高;
◇实时在线;
◇按流量收费;
◇不受距离远近的影响;
◇快捷登录。
2.1 GPRS组网方式
在本系统中,利用GPRS移动通信网络实现信息的双向传输。机器人小车传给远程监控平台的数据主要包括现场图像信息和小车当前定位信息;
机器人 传感器 DSP CMOS 电压 PWM ADC LCD 编码器 电路 电流 单片机 收发器 C语言 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)