便携式移动机器人手持监控系统
时间:07-30
来源:互联网
点击:
设计实例
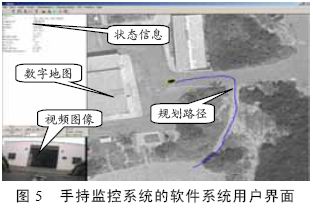
该手持监控系统已应用到履带结构便携式移动机器人实验平台。在室外实验场地测试取得较好的效果,测试过程中软件系统用户界面如图5。用户界面分为三部分:机器人自身状态信息显示、视频图像数据显示、数字地图显示。
结论
便携式移动机器人手持监控系统在履带结构便携式移动机器人实验平台上通过测试。嵌入式硬件结构和嵌入式操作系统的引入符合移动智能终端设备体积小、重量轻、实时性强、可靠性高的设计要求。
该手持监控系统已应用到履带结构便携式移动机器人实验平台。在室外实验场地测试取得较好的效果,测试过程中软件系统用户界面如图5。用户界面分为三部分:机器人自身状态信息显示、视频图像数据显示、数字地图显示。
结论
便携式移动机器人手持监控系统在履带结构便携式移动机器人实验平台上通过测试。嵌入式硬件结构和嵌入式操作系统的引入符合移动智能终端设备体积小、重量轻、实时性强、可靠性高的设计要求。
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)