制作机器人常用传感器盘点
时间:02-23
来源:互联网
点击:
4、速度
机器人自身的行走速度对于判断机器人运动状态和机器人所在位置非常重要,这里我们主要讨论一下机器人小车运动速度的测量。
机器人小车依靠电动机驱动轮子来运动,因此测量机器人小车的速度可以归结为测量驱动电动机的转速。
那么怎么测量电动机的转速呢?
测量电机转速有很多种方法,比较适合个人机器人爱好者的是光电编码器。
光电编码器也有很多种,在个人机器人上比较常见的有两种:一种为反射式,一种为透射式。(都是我随口起的名字^_^)
反射式的基本结构为在电机的旋转轴上加一个圆形的黑白相间码盘(很多都是粘在轮子上),距离码盘很近的距离固定一个红外发射接收一体模块,利用黑白色对红外线的吸收率不同,红外线照射到黑色部分时,大部分被吸收而无反射信号;红外线照射到白色部分时,大部分红外线被反射回来而产生强烈的反射信号。当码盘随电机旋转时,红外接收端的输出信号便是一个由旋转速度决定频率的方波。进而我们便可知道此时电机的旋转速度。
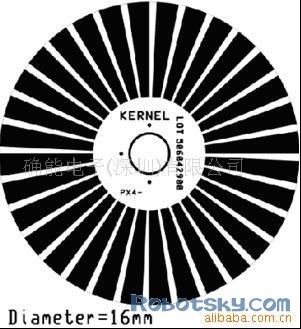
码盘外形图
透射式检测原理与反射式相似。唯一的不同是没有上图中的那种黑白相间的码盘,而是在光栅圆盘上开了一圈小孔,红外线或可见光的发射端与检测端分别位于光栅圆盘的两侧,同样是利用光栅圆盘旋转以后产生的脉冲信号来检测电机的旋转速度。
光栅盘式光电编码器原理图
其实这两种传感器从本质上来说都属于光电传感器,这类传感器的特点是价格便宜,结构可靠,检测结果准确。缺点是对于安装位置要求较高,因此建议大家购买电机时选择配备了光电编码器的电机,免去自己安装可能带来的种种问题。
检测电机转速,除了光电传感器之外,还有一些利用磁效应原理的传感器,汽车上经常使用这种传感器,我这里不再详细介绍了。
5、地面灰度
很多人最开始做的机器人小车基本功能就是循线,白色的地板上贴着一条黑线,让机器人小车沿着地面的黑线前进。很多机器人高手都是从类似的作品成长起来的。因此有必要介绍一下检测地面灰度的常用传感器。
可见光地面灰度检测器:所谓的可见光地面灰度检测器,就是使用一个发光装置与一个光敏电阻搭配,装在机器人底部离地面较近的一个位置上。利用不同颜色对可见光的吸收程度不同的原理来检测地面灰度。发光装置发射可见光,照射到不同颜色上面后反射光的强度会有一定的差异,根据光敏电阻的返回值便可知道现在机器人下面的地面颜色。

一种利用发光二极管作为发光装置的地面灰度检测器
我当初做的时候最初是自己弄了个小灯泡,可是效果不理想,后来换了个摩托车上的6v灯泡,效果好多了,就是电池受不了。后来买了个与图中差不多的灰度传感器,耗电量下来的,检测效果也还可以,但是还是会有漏测的现象,而且容易受到环境光的干扰。于是后来就使用了一种非可见光的检测方式。
红外线地面灰度检测器:前面介绍光电编码器的时候已经提到了,反射式光电编码器的码盘由黑白相间的条纹组成,利用黑白颜色对红外线的吸收程度不同来检测码盘的旋转。其实如果引申一下,把机器人巡线的场地看成一个大码盘,其实也是黑白相间,这样每当机器人越过一条白线,就相当于光电编码器上的码盘转动了一个最小角度,光电编码器的输出高低电平便会变化一次。
这种检测方式比较准确,很少出现漏检的情形,抗干扰能力也比较强,唯一的劣势就是对传感器本身的离地间隙要求较高,高一点或矮一点都不行。因此便对机器人的工作环境要求较高,不平的地面肯定是不行的。
这两种地面灰度检测方式成本都比较低廉,具体采用哪一种便由你自己的确切应用来决定了。
6、其他
以上这些是我个人比较熟悉,并且在个人爱好者中应用比较广泛的几种传感器,微电子领域的发展速度是日新月异的,每天都在有各种各样的新传感器问世,很多以前高不可攀的传感器如今也变成了几块钱甚至几毛钱一个,因此经常去电子市场转转,关注一下最新的传感器信息都是必要的。
其他制作个人机器人常用的传感器还有数字指南针、加速度传感器等,一般都是用在比较复杂的应用上,本篇文章的面向对象是准备制作第一个机器人作品的新手朋友们,因此就不再详细介绍了,有兴趣的朋友可以自己去了解一下。
来源:机器人天空
机器人自身的行走速度对于判断机器人运动状态和机器人所在位置非常重要,这里我们主要讨论一下机器人小车运动速度的测量。
机器人小车依靠电动机驱动轮子来运动,因此测量机器人小车的速度可以归结为测量驱动电动机的转速。
那么怎么测量电动机的转速呢?
测量电机转速有很多种方法,比较适合个人机器人爱好者的是光电编码器。
光电编码器也有很多种,在个人机器人上比较常见的有两种:一种为反射式,一种为透射式。(都是我随口起的名字^_^)
反射式的基本结构为在电机的旋转轴上加一个圆形的黑白相间码盘(很多都是粘在轮子上),距离码盘很近的距离固定一个红外发射接收一体模块,利用黑白色对红外线的吸收率不同,红外线照射到黑色部分时,大部分被吸收而无反射信号;红外线照射到白色部分时,大部分红外线被反射回来而产生强烈的反射信号。当码盘随电机旋转时,红外接收端的输出信号便是一个由旋转速度决定频率的方波。进而我们便可知道此时电机的旋转速度。
码盘外形图
透射式检测原理与反射式相似。唯一的不同是没有上图中的那种黑白相间的码盘,而是在光栅圆盘上开了一圈小孔,红外线或可见光的发射端与检测端分别位于光栅圆盘的两侧,同样是利用光栅圆盘旋转以后产生的脉冲信号来检测电机的旋转速度。
光栅盘式光电编码器原理图
其实这两种传感器从本质上来说都属于光电传感器,这类传感器的特点是价格便宜,结构可靠,检测结果准确。缺点是对于安装位置要求较高,因此建议大家购买电机时选择配备了光电编码器的电机,免去自己安装可能带来的种种问题。
检测电机转速,除了光电传感器之外,还有一些利用磁效应原理的传感器,汽车上经常使用这种传感器,我这里不再详细介绍了。
5、地面灰度
很多人最开始做的机器人小车基本功能就是循线,白色的地板上贴着一条黑线,让机器人小车沿着地面的黑线前进。很多机器人高手都是从类似的作品成长起来的。因此有必要介绍一下检测地面灰度的常用传感器。
可见光地面灰度检测器:所谓的可见光地面灰度检测器,就是使用一个发光装置与一个光敏电阻搭配,装在机器人底部离地面较近的一个位置上。利用不同颜色对可见光的吸收程度不同的原理来检测地面灰度。发光装置发射可见光,照射到不同颜色上面后反射光的强度会有一定的差异,根据光敏电阻的返回值便可知道现在机器人下面的地面颜色。
一种利用发光二极管作为发光装置的地面灰度检测器
我当初做的时候最初是自己弄了个小灯泡,可是效果不理想,后来换了个摩托车上的6v灯泡,效果好多了,就是电池受不了。后来买了个与图中差不多的灰度传感器,耗电量下来的,检测效果也还可以,但是还是会有漏测的现象,而且容易受到环境光的干扰。于是后来就使用了一种非可见光的检测方式。
红外线地面灰度检测器:前面介绍光电编码器的时候已经提到了,反射式光电编码器的码盘由黑白相间的条纹组成,利用黑白颜色对红外线的吸收程度不同来检测码盘的旋转。其实如果引申一下,把机器人巡线的场地看成一个大码盘,其实也是黑白相间,这样每当机器人越过一条白线,就相当于光电编码器上的码盘转动了一个最小角度,光电编码器的输出高低电平便会变化一次。
这种检测方式比较准确,很少出现漏检的情形,抗干扰能力也比较强,唯一的劣势就是对传感器本身的离地间隙要求较高,高一点或矮一点都不行。因此便对机器人的工作环境要求较高,不平的地面肯定是不行的。
这两种地面灰度检测方式成本都比较低廉,具体采用哪一种便由你自己的确切应用来决定了。
6、其他
以上这些是我个人比较熟悉,并且在个人爱好者中应用比较广泛的几种传感器,微电子领域的发展速度是日新月异的,每天都在有各种各样的新传感器问世,很多以前高不可攀的传感器如今也变成了几块钱甚至几毛钱一个,因此经常去电子市场转转,关注一下最新的传感器信息都是必要的。
其他制作个人机器人常用的传感器还有数字指南针、加速度传感器等,一般都是用在比较复杂的应用上,本篇文章的面向对象是准备制作第一个机器人作品的新手朋友们,因此就不再详细介绍了,有兴趣的朋友可以自己去了解一下。
来源:机器人天空
机器人 电子 传感器 电路 红外 电路图 电压 单片机 电阻 电流 电动机 编码器 二极管 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- CAN总线技术在工业码垛机器人控制系统中的应用研究(06-27)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)
- 工业机器人技术(02-23)