CAN总线技术在工业码垛机器人控制系统中的应用研究
时间:06-27
来源:互联网
点击:
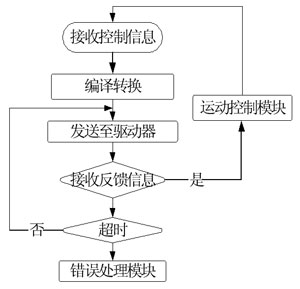
图3 CANopen协议通信程序流程图
实际应用过程中,控制系统CANopen初始化及应用流程如下。
1 电机驱动器初始化设置。设置电机驱动器的控制方式为总线控制方式,电机驱动器的节点ID,系统通信波特率可在电机驱动器的HMI界面中进行设置,也可采用电机驱动器自带的本地调试软件PowerSuit进行本地设置。
2 PCI-CAN适配卡初始化设置。在工控机一侧对PCI-CAN适配卡进行初始化设置,主要设置内容有CAN总线节点个数,波特率,CANopen协议命令的收发方式以及滤波方式等。
工业码垛机器人的运动控制程序主要完成对码垛方式的分解,解算相应驱动电机的运行参数并通过CANopen协议通信模块发送以完成工业码垛机器人的作业动作。具体解算方式因货物形状、码放位置和码放方式有所区别,在此不一一赘述。
错误处理模块的主要功能是接收驱动器返回的错误类型代码,根据电机驱动器厂家定义的对象字典判断所属错误类型并执行对应的错误处理函数或报警。
机器人 PLC 总线 CAN总线 嵌入式 编码器 触摸屏 相关文章:
- 基于MSP430的自主式移动机器人设计与实现(06-12)
- 如何制作一个最简单的机器人(02-23)
- 机器人技术的新进展(02-23)
- 制作机器人常用传感器盘点(02-23)
- 基于LabVIEW构建智能的移动机器人及无人驾驶车(10-27)
- 工业机器人技术(02-23)