FPGA 101 手把手课堂:让 XDC 时序约束为您效力
时间:01-20
来源:互联网
点击:
时序和布局约束是实现设计要求的关键因素。本文是介绍其使用方法的入门读物。
作者:e2v 公司首席工程师 Adam Taylor
aptaylor@theiet.org
完成 RTL 设计只是 FPGA 设计量产准备工作中的一部分。接下来的挑战是确保设计满足芯片内的时序和性能要求。为此,您经常需要定义时序和布局约束。
我们了解一下在基于赛灵思 FPGA 和 SoC 设计系统时如何创建和使用这两种约束。
时序约束
最基本的时序约束定义了系统时钟的工作频率。然而,更高级的约束能建立时钟路径之间的关系。工程师利用这类约束确定是否有必要对路径进行分析,或者在时钟路径之间不存在有效的时序关系时忽视路径。
默认情况下,赛灵思的 Vivado® 设计套件会分析所有关系。然而,并非设计中的所有时钟之间都有可以准确分析的时序关系。例如当时钟是异步的,就无法准确确定它们的相位,如图 1 所示。
您可通过在约束文件中声明时钟组来管理时钟路径之间的关系。当声明时钟组时,Vivado 工具不会对组内定义的时钟之间的任何方向执行时序分析。
为了有助于生成时序约束,Vivado 工具将时钟定义为三种类型:同步、异步或不可扩展。
• 同步时钟具有可预测的时序/相位关系。通常主时钟及其衍生时钟符合这种特性,因为它们具有公共的根起源和周期。
• 异步时钟之间不具备可预测的时序/相位关系。通常不同的主时钟(及其衍生时钟)符合这种特性。异步时钟有不同的起源。
• 如果超过1,000个周期后,仍无法确定公共周期,那么两个时钟就是不可扩展的。如果是这种情况,将使用 1,000 个周期内的最差建立时间关系。不过,无法保证这就是实际的最差情况。
使用 Vivado 生成的时钟报告来确定您所处理的时钟是哪种类型。该报告可帮助您识别异步和不可扩展时钟。
识别出这些时钟后,您就可利用“set clock group”约束禁止它们之间的时序分析。Vivado 套件使用的是赛灵思设计约束 (XDC),其基于广泛使用的 Tcl 约束格式的 Synopsys 设计约束 (SDC)。通过 XDC 约束,您可使用以下命令定义时钟组:
set_clock_groups -name -logically_exclusive -physically_exclusive -asynchronous -group
-name 是为组赋予的名称。-group 选项是定义组成员(即没有时序关系的时钟)的位置。当有多个用来驱动时钟树的时钟源可供选择,包括 BUFGMUX 和 BUFGCTL,应使用 logically 和 physically exclusive 选项。从而,这些时钟不能同时出现在时钟树上。所以,我们不希望 Vivado 分析这些时钟之间的关系,因为它们是互斥的。最后,–asynchronous 约束可用来定义异步时钟路径。
建立时序关系的最后一个方面是考虑时钟的非理想关系,尤其是抖动。您需要考虑两种形式的抖动:输入抖动和系统抖动。输入抖动出现在主时钟输入上,体现了实际跳变出现时间与理想条件下跳变出现时间之间的差异。系统抖动源自
设计中存在的噪声。
您可以使用 set_input_jitter 约束来定义每个主输入时钟的抖动。同时,使用 set_system_jitter 约束为整个设计(所有时钟)设定系统抖动。
时序例外
当有时序例外时,您还必须关注已定义的时钟组内发生了什么。然而,什么是时序例外呢?
一种常见的时序例外是只有每隔一个时钟周期所采样的结果。另一种情况是将数据从慢时钟传输到更快的时钟(或相反),其中两个时钟都是同步的。事实上,这两种时序例外一般被称为多周期路径,如图 2 所示。
为这些路径声明多周期路径能实现更合适而且要求放松的时序分析,从而让时序引擎集中处理其它更关键的路径。最后的益处是能够提高结果质量。
您可以在 XDC 文件中使用以下 XDC 命令声明多周期路径:
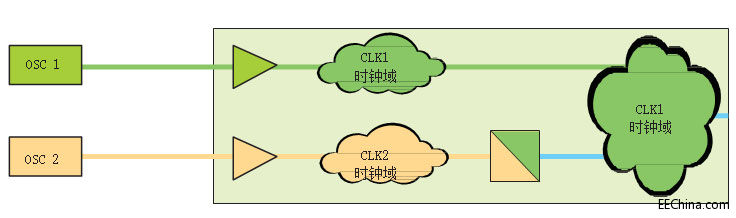
图 1–时钟域 CLK1 和 CLK2 相互之间异步。
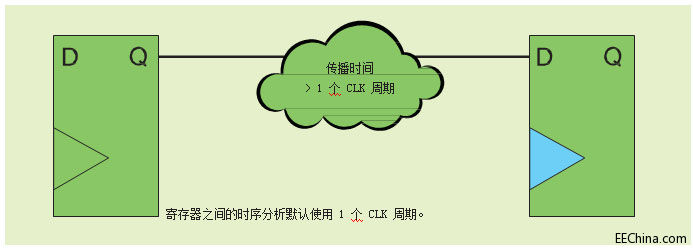
图 2–多周期路径是一种时序例外的例子。
set_multicycle_path path_ multiplier [-setup|-hold]
[-start|-end][-from <start- points>] [-to <endpoints>]
[-through <pins|cells|nets>]
当您声明多周期路径时,实际上是将建立或保持(或二者皆有)分析要求与 path_mutiplier 相乘。例如在上面的第一个实例中,每两个时钟周期有一次输出,因此对于建立时序而言 path_multiplier 是 2。由于多周期路径既可应用到建立时间又可应用到保持时间,那么您可以选择其应用位置。当您声明建立时间乘数时,最佳做法通常是使用下面的公式同时声明一个保持时间乘数。
保持周期 = 建立乘数 – 1 – 保持乘数
这对于我们所介绍的下列简单实例意味着,保持乘数由下面这个公式确定:
保持乘数 = 建立乘数 – 1,当使用公共时钟时。
为了演示多周期路径的重要性,我创建了一个简单实例,您可在这里下载。在 XDC 文件中有一个实例包含了建立和保持这两个已被同时声明的多周期路径。
作者:e2v 公司首席工程师 Adam Taylor
aptaylor@theiet.org
完成 RTL 设计只是 FPGA 设计量产准备工作中的一部分。接下来的挑战是确保设计满足芯片内的时序和性能要求。为此,您经常需要定义时序和布局约束。
我们了解一下在基于赛灵思 FPGA 和 SoC 设计系统时如何创建和使用这两种约束。
时序约束
最基本的时序约束定义了系统时钟的工作频率。然而,更高级的约束能建立时钟路径之间的关系。工程师利用这类约束确定是否有必要对路径进行分析,或者在时钟路径之间不存在有效的时序关系时忽视路径。
默认情况下,赛灵思的 Vivado® 设计套件会分析所有关系。然而,并非设计中的所有时钟之间都有可以准确分析的时序关系。例如当时钟是异步的,就无法准确确定它们的相位,如图 1 所示。
您可通过在约束文件中声明时钟组来管理时钟路径之间的关系。当声明时钟组时,Vivado 工具不会对组内定义的时钟之间的任何方向执行时序分析。
为了有助于生成时序约束,Vivado 工具将时钟定义为三种类型:同步、异步或不可扩展。
• 同步时钟具有可预测的时序/相位关系。通常主时钟及其衍生时钟符合这种特性,因为它们具有公共的根起源和周期。
• 异步时钟之间不具备可预测的时序/相位关系。通常不同的主时钟(及其衍生时钟)符合这种特性。异步时钟有不同的起源。
• 如果超过1,000个周期后,仍无法确定公共周期,那么两个时钟就是不可扩展的。如果是这种情况,将使用 1,000 个周期内的最差建立时间关系。不过,无法保证这就是实际的最差情况。
使用 Vivado 生成的时钟报告来确定您所处理的时钟是哪种类型。该报告可帮助您识别异步和不可扩展时钟。
识别出这些时钟后,您就可利用“set clock group”约束禁止它们之间的时序分析。Vivado 套件使用的是赛灵思设计约束 (XDC),其基于广泛使用的 Tcl 约束格式的 Synopsys 设计约束 (SDC)。通过 XDC 约束,您可使用以下命令定义时钟组:
set_clock_groups -name -logically_exclusive -physically_exclusive -asynchronous -group
-name 是为组赋予的名称。-group 选项是定义组成员(即没有时序关系的时钟)的位置。当有多个用来驱动时钟树的时钟源可供选择,包括 BUFGMUX 和 BUFGCTL,应使用 logically 和 physically exclusive 选项。从而,这些时钟不能同时出现在时钟树上。所以,我们不希望 Vivado 分析这些时钟之间的关系,因为它们是互斥的。最后,–asynchronous 约束可用来定义异步时钟路径。
建立时序关系的最后一个方面是考虑时钟的非理想关系,尤其是抖动。您需要考虑两种形式的抖动:输入抖动和系统抖动。输入抖动出现在主时钟输入上,体现了实际跳变出现时间与理想条件下跳变出现时间之间的差异。系统抖动源自
设计中存在的噪声。
您可以使用 set_input_jitter 约束来定义每个主输入时钟的抖动。同时,使用 set_system_jitter 约束为整个设计(所有时钟)设定系统抖动。
时序例外
当有时序例外时,您还必须关注已定义的时钟组内发生了什么。然而,什么是时序例外呢?
一种常见的时序例外是只有每隔一个时钟周期所采样的结果。另一种情况是将数据从慢时钟传输到更快的时钟(或相反),其中两个时钟都是同步的。事实上,这两种时序例外一般被称为多周期路径,如图 2 所示。
为这些路径声明多周期路径能实现更合适而且要求放松的时序分析,从而让时序引擎集中处理其它更关键的路径。最后的益处是能够提高结果质量。
您可以在 XDC 文件中使用以下 XDC 命令声明多周期路径:
图 1–时钟域 CLK1 和 CLK2 相互之间异步。
图 2–多周期路径是一种时序例外的例子。
set_multicycle_path path_ multiplier [-setup|-hold]
[-start|-end][-from <start- points>] [-to <endpoints>]
[-through <pins|cells|nets>]
当您声明多周期路径时,实际上是将建立或保持(或二者皆有)分析要求与 path_mutiplier 相乘。例如在上面的第一个实例中,每两个时钟周期有一次输出,因此对于建立时序而言 path_multiplier 是 2。由于多周期路径既可应用到建立时间又可应用到保持时间,那么您可以选择其应用位置。当您声明建立时间乘数时,最佳做法通常是使用下面的公式同时声明一个保持时间乘数。
保持周期 = 建立乘数 – 1 – 保持乘数
这对于我们所介绍的下列简单实例意味着,保持乘数由下面这个公式确定:
保持乘数 = 建立乘数 – 1,当使用公共时钟时。
为了演示多周期路径的重要性,我创建了一个简单实例,您可在这里下载。在 XDC 文件中有一个实例包含了建立和保持这两个已被同时声明的多周期路径。
FPGA 赛灵思 SoC 电压 CMOS PCB 连接器 电阻 DSP 相关文章:
- 基于FPGA的片上系统的无线保密通信终端(02-16)
- 基于Virtex-5 FPGA设计Gbps无线通信基站(05-12)
- 基于FPGA的DVI/HDMI接口实现(05-13)
- 基于ARM的嵌入式系统中从串配置FPGA的实现(06-09)
- 采用EEPROM对大容量FPGA芯片数据实现串行加载(03-18)
- 赛灵思:可编程逻辑不仅已是大势所趋,而且势不可挡(07-24)