基于FPGA的结构光图像中心线提取
时间:12-03
来源:互联网
点击:

3 FPGA实现的结果
本文FPGA采用的是Altera公司Cyclone III系列的EP3C40F484C6芯片,并在Altera公司的QUARTUS II 软件平台上,利用硬件描述语言Verilog HDL 表达实现。对于一幅大小为576行、720列的结构光条纹图像,以每秒25帧的速率到达时,利用配置为2.53GHz Intel CPU 、3GB内存的通用微型计算机通过软件编程的方式实现对一帧大小为576行、720列的图像进行提取激光中心线操作,耗时71.5 毫秒。而利用以上专用硬件实现的算法经过仿真的系统最高频率达到100MHz ,高出了系统像素点时钟频率(50MHz ),处理同样的一帧图像需耗时4.1毫秒,速度提高将近20倍,且FPGA逻辑资源占用16% 。足以在视频图像输入的同时完成计算,达到了设计目的。并将系统的采集图片与处理后的图片进行比较,处理结果图6图7所示。图6a、7a为采集图像,图6b、7b为MATLAB处理结果,图6c、7c为EP3C40F484C6处理结果。

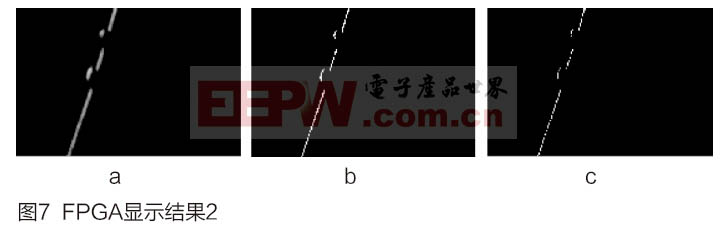
实验结果显示可以看出:在精度上FPGA相比PC端稍好,体现在线条的细节表现及线条提取的平滑度上。而且在运行速度上,FPGA提取速度明显优于PC机提取的速度。但是不足的是由于模板所取的宽度较小,所以对于一些光带宽度较大,光强横向分布不均匀的图像,正如图7所示,则该方法提取的图形精度不高,图像较为不平滑。这些也将是下一步需要研究的内容。
4 结束语
精度和速度是大数据量背景下中心线提取方法的核心指标,本文利用FPGA硬件电路的并行体系结构,将以FPGA为核心的实时处理系统应用结构光三维测量系统当中,以硬件形式实现图像光带中心线提取的算法,经过实验表明,对于这些宽度不大且分布均匀的结构光,该方法对中心线提取精确、快速。满足结构光三维测量的要求。
参考文献:
[1]Song Zhang,Peisen S Huang.High-resolution real-time three-dimensional shape measurement[J].Optical Engineering,2006,12(45):1-8
[2]Erik Naesset, Ross Nelson.Using airborne laser scanning to monitor tree migrationin the boreal-alpine transition zone[J].Remote Sensing of Environment,2007,110(3):357-369
[3]李莹莹,张志毅,袁林.线结构光光条中心提取综述[J].中国激光杂志社,2013,50
[4]于起峰,陆宏伟,刘肖琳. 基于图像的精密测量与运动测量[M]. 北京: 科学出版社, 2002
[5]胡斌,李德华,金刚等。基于方向模板的结构光条纹中心检测方法[J]。计算机工程与应用,2002,38(11):59-60
[6]江 洁,邓珏琼,张广军。光条纹中心的实时快速提取[J]. 光学技术,2008 ,34(2):170-174
[7]张广军. 机器视觉[M]. 北京: 科学出版社, 2005
[8]姚文达, 田庆国, 陈兴梧. 三维扫描图像光带中心线提取的FPGA实现[J]. 天津工业大学学报, 2010, 29:50-52
[9]钱铮铁, 李德华. 基于FPGA的激光条纹中心实时检测[J]. 计算机工程与应用, 2004, 40(27):49-52
[10]张杰. 基于FPGA的数字图像处理[D]. 武汉科技大学, 2009
FPGA 编码器 Altera 解码器 Verilog 仿真 电路 机器视觉 相关文章:
- 基于FPGA的片上系统的无线保密通信终端(02-16)
- 基于Virtex-5 FPGA设计Gbps无线通信基站(05-12)
- 基于FPGA的DVI/HDMI接口实现(05-13)
- 基于ARM的嵌入式系统中从串配置FPGA的实现(06-09)
- 采用EEPROM对大容量FPGA芯片数据实现串行加载(03-18)
- 赛灵思:可编程逻辑不仅已是大势所趋,而且势不可挡(07-24)