基于多DSP和FPGA的实时双模视频跟踪装置
时间:11-09
来源:互联网
点击:
4、系统工作状态分析
为实现使自动有序的跟踪,我们确定系统各个跟踪状态和各状态之间的转换条件。
本系统跟踪状态有四种:
S0 搜索状态 发生在系统初始工作或目标完全丢失阶段。
S1 捕获状态 系统处于发现目标状态。
S2 正常跟踪状态 系统处于对目标的正常跟踪中。
S3 预测跟踪 目标偶尔丢失时,系统通过自学习对当前目标进行预测跟踪,并试图再捕获目标。
本系统转换条件有三种:
C1目标截获。
C2目标偶然丢失,指目标瞬间丢失,其运动仍具有可预测性。
C3目标深度丢失,指目标丢失一段时间,其运动不可预测
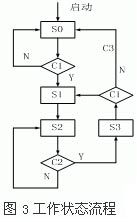
系统状态转换情况如图3所示。在视频跟踪装置启动并初始化后,进入搜索状态S0,系统按照一定的扫搜规律进行搜索;当形心跟踪模块发现移动目标,则进入捕获状态S1;由相关跟踪模块对目标进行识别,确认后进入正常跟踪状态S2;当目标偶尔丢失时,系统通过自学习对当前目标进行预测跟踪,并试图再捕获目标,进入预测跟踪状态S3;如果目标完全丢失,则改变搜索策略,重新再搜索,以便有可能再次捕获目标。
5、结论
本视频跟踪装置在设计上能完成对移动目标的检测和跟踪,初步实验结果表明采用基于DSP和FPGA的硬件实现算法使系统的实时性能得到很大提高。双模式的图像跟踪算法使系统适合多种背景下的移动目标跟踪,自适应能力强,抗干扰性能好,具有锁定目标短暂丢失后的再次捕获能力,提高了跟踪的可信度。但本设计拟在下面两个方面作进一步的研究。一是考虑本装置的军事应用背景,需要目标,尤其是远方目标有相对较高的速度才能触发系统捕获,因此没有考虑摄像头自身跟踪时的运动补偿。否则,必须加入摄像机运动估计和补偿;二是对移动目标的识别能力还需加强,在设定特定跟踪目标上,尤其是跟踪到多个移动目标时,不具备区分的能力,需要改进到能识别设定中的跟踪目标并完成对设定目标的跟踪。
为实现使自动有序的跟踪,我们确定系统各个跟踪状态和各状态之间的转换条件。
本系统跟踪状态有四种:
S0 搜索状态 发生在系统初始工作或目标完全丢失阶段。
S1 捕获状态 系统处于发现目标状态。
S2 正常跟踪状态 系统处于对目标的正常跟踪中。
S3 预测跟踪 目标偶尔丢失时,系统通过自学习对当前目标进行预测跟踪,并试图再捕获目标。
本系统转换条件有三种:
C1目标截获。
C2目标偶然丢失,指目标瞬间丢失,其运动仍具有可预测性。
C3目标深度丢失,指目标丢失一段时间,其运动不可预测
系统状态转换情况如图3所示。在视频跟踪装置启动并初始化后,进入搜索状态S0,系统按照一定的扫搜规律进行搜索;当形心跟踪模块发现移动目标,则进入捕获状态S1;由相关跟踪模块对目标进行识别,确认后进入正常跟踪状态S2;当目标偶尔丢失时,系统通过自学习对当前目标进行预测跟踪,并试图再捕获目标,进入预测跟踪状态S3;如果目标完全丢失,则改变搜索策略,重新再搜索,以便有可能再次捕获目标。
5、结论
本视频跟踪装置在设计上能完成对移动目标的检测和跟踪,初步实验结果表明采用基于DSP和FPGA的硬件实现算法使系统的实时性能得到很大提高。双模式的图像跟踪算法使系统适合多种背景下的移动目标跟踪,自适应能力强,抗干扰性能好,具有锁定目标短暂丢失后的再次捕获能力,提高了跟踪的可信度。但本设计拟在下面两个方面作进一步的研究。一是考虑本装置的军事应用背景,需要目标,尤其是远方目标有相对较高的速度才能触发系统捕获,因此没有考虑摄像头自身跟踪时的运动补偿。否则,必须加入摄像机运动估计和补偿;二是对移动目标的识别能力还需加强,在设定特定跟踪目标上,尤其是跟踪到多个移动目标时,不具备区分的能力,需要改进到能识别设定中的跟踪目标并完成对设定目标的跟踪。
机器人 红外 DSP FPGA 电路 开关电源 仿真 C语言 滤波器 相关文章:
- 用单片机和CPLD实现步进电机的控制(08-06)
- 基于CPLD的直流无刷电机驱动电路设计(08-20)
- 基于梯形图VHDL的CPLD开发方法研究(11-07)
- 用可编程模拟器件实现直流伺服电机的速度控制(11-08)
- 基于PC+PLC等离子熔射自动控制系统设计(11-08)
- 基于FPGA设计EnDat编码器数据采集后续电路(01-29)