基于FPGA的高速运动目标单光幕测速系统设计
时间:11-09
来源:互联网
点击:
4.2 目标运动方向偏差的影响
在目标运动速度与光束的方向垂直时,可近似取目标长度L,计算运动目标速度,但当目标并没有严格垂直于光束而有θ的偏转时,L是与目标运动方向相关的量,L'=LCOSθ。假设目标在出口处最大偏差角为1°,则可计算出长度误差△L1=L-L'=L(1-COSθ)=1.523×10-4L,若取长度L=O.1 m计算,则△L1=1.523×10-5m。
4.3 光点直径的影响
由于光束不是无限细,所以无法确定目标挡住多少光束时光敏器件会产生信号,假设光束直径(d)为1 mm,目标速度(v)为1 000 m/s时,最大时间误差△t2=d/v=1μs。
4.4 计数误差的影响
该设计中采用40 MHz的晶振,定时步长为25 ns,由于无法确定计数开始时的时钟状态,所以在计数的开始和结束时均可能产生最大一个时钟周期的计数误差,最大误差为△t3=25×2=50 ns。
4.5 目标测量精度的影响
被测目标的长度L在测量过程中,由于测量工具的限制,得到的被测目标长度值也不可避免地会存在误差,假设用高精度的游标卡尺测量,测量精度可以达到0.01 mm,△L2=0.01 mm。通过分析,目标运动距离测量总误差为:
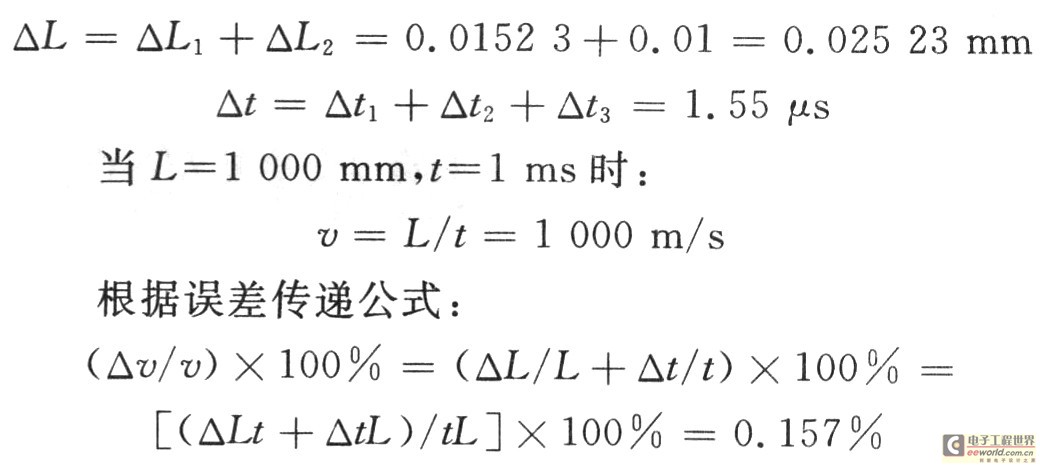
通过以上计算,系统的总体误差为0.157%,达到较高的精度。
5 结 语
本文在充分调查了当前针对高速运动目标的速度测量方法的基础上,提出利用单光幕平均速度测量法测量高速运动目标的速度。避免了使用双光幕平均速度测量法时由于两路信号时延不同和两光幕不平行而产生的误差;同时减少一个光幕的使用,降低了系统成本。采用高时钟频率的FPGA作为主要实现芯片,在进一步减小系统误差的同时保证了系统的工作速度和稳定性,是一套较为理想的速度测量方案。
在目标运动速度与光束的方向垂直时,可近似取目标长度L,计算运动目标速度,但当目标并没有严格垂直于光束而有θ的偏转时,L是与目标运动方向相关的量,L'=LCOSθ。假设目标在出口处最大偏差角为1°,则可计算出长度误差△L1=L-L'=L(1-COSθ)=1.523×10-4L,若取长度L=O.1 m计算,则△L1=1.523×10-5m。
4.3 光点直径的影响
由于光束不是无限细,所以无法确定目标挡住多少光束时光敏器件会产生信号,假设光束直径(d)为1 mm,目标速度(v)为1 000 m/s时,最大时间误差△t2=d/v=1μs。
4.4 计数误差的影响
该设计中采用40 MHz的晶振,定时步长为25 ns,由于无法确定计数开始时的时钟状态,所以在计数的开始和结束时均可能产生最大一个时钟周期的计数误差,最大误差为△t3=25×2=50 ns。
4.5 目标测量精度的影响
被测目标的长度L在测量过程中,由于测量工具的限制,得到的被测目标长度值也不可避免地会存在误差,假设用高精度的游标卡尺测量,测量精度可以达到0.01 mm,△L2=0.01 mm。通过分析,目标运动距离测量总误差为:
通过以上计算,系统的总体误差为0.157%,达到较高的精度。
5 结 语
本文在充分调查了当前针对高速运动目标的速度测量方法的基础上,提出利用单光幕平均速度测量法测量高速运动目标的速度。避免了使用双光幕平均速度测量法时由于两路信号时延不同和两光幕不平行而产生的误差;同时减少一个光幕的使用,降低了系统成本。采用高时钟频率的FPGA作为主要实现芯片,在进一步减小系统误差的同时保证了系统的工作速度和稳定性,是一套较为理想的速度测量方案。
- 基于Virtex-5 FPGA设计Gbps无线通信基站(05-12)
- 基于FPGA的DVI/HDMI接口实现(05-13)
- 基于ARM的嵌入式系统中从串配置FPGA的实现(06-09)
- 基于PLB总线的H.264整数变换量化软核的设计(03-20)
- FPGA按键模式的研究与设计(03-24)
- 周立功:如何兼顾学习ARM与FPGA(05-23)