基于可编程控制器的工业机械手无线遥控系统
时间:11-08
来源:互联网
点击:
针对多关节工业机械手的比例和开关控制,以PLC作为其控制器,通过无线数传模块进行数据传输,实现远程无线遥控操作。
手持操作器采用16位单片机,对检测到的按钮和摇杆操作进行数据编码后通过无线的方式发送至PLC,PLC对其解码后获得指令实现对机械手各关节运动的控制。该方案成本低,具有良好的通用性和可扩展性。
前言
可编程序逻辑控制器(ProgrammableLogicController,PLC)是一种适用性强的工业用控制器,广泛应用于各类工业生产线,移动机械设备的控制等环境较恶劣的工业场合。其工作性能稳定,可扩展性强,应用简便。根据不同的模块配置,可以进行逻辑及算数运算,对数字开关量、模拟量等进行控制和采集,同时具有丰富的总线接口形式,可以利用公开的协议与不同设备构成复杂的系统。在我们所研制的工业机械手中,各关节由比例阀或开关阀构成开环液压控制回路,实现比例调速或开关动作,因此我们选用了西门子的S7-200系列PLC作为其控制器。
在一些环境复杂的应用场合,尤其是对于移动机械设备,控制系统的布线受到诸多限制,操作人员与控制系统的位置安排不方便。因此,具有高度灵活性的无线遥控操作系统的应用得到了推广。目前工业上应用的无线遥控操作系统一般采用无线电数字传输方式。一些芯片厂商如Infineon、Micrel、RFMonolithics、Melexis、CML、ATMEL等也都推出了各种适应于不同场合和要求的RF芯片。
无线数传模块是一种集成式的专用于无线数据收发的模块,可直接通过数据总线与其它控制、采集等模块连接完成无线数据收发功能,广泛应用于工业遥控、遥测,无线抄表,自动化数据采集等场合。具有可靠性高,功耗低,协议透明使用方便等优点。传输距离可以达到几十至上百米,有些甚至可以到上千米的距离。目前很多厂商推出了工业化、系列化的产品,可以根据不同的使用场合和要求选择合适的产品。
目前一些厂家推出了专用的基于嵌入式处理器的工业用无线遥控器,其性能优异,集成度高。如HBC、JAY等,应用于混凝土泵车、装载机等场合。但由于其一般针对专用工程设备,不具有较好的通用性及可扩展性,且主要是国外厂家,价格高昂,其应用推广受到限制。
在我们研制的多关节工业机械手中,采用PLC作为其主控制器,完成对液压泵站和各关节液压阀的开关及比例控制,实现机械手的基本功能。采用无线数传模块通过无线通信方式收发数字信号,实现远程无线遥控功能,所设计的手持遥控器的输入开关量及模拟量由16位单片机采集并编码输出。
1.总体方案
该机械手用于巷道内进行混凝土喷浆作业,有自动和手动操作两种模式。自动模式下,PLC控制机械手各关节按程序预定的轨迹运动,调整机械手末端的方位与角度,使喷浆喷头按设定轨迹运动,且始终垂直于受喷的巷道面,完成巷道表面的喷浆作业。手动模式下,由操作员分别采用按钮和比例摇杆对开关阀和比例阀进行控制,驱动各关节运动,控制混凝土喷头的方位及角度。其中按钮控制泵站的启停及开关阀的方向切换,比例摇杆则根据操作人员的控制,形成一个±10V范围内的模拟量,比例阀根据模拟量的大小及方向,控制关节运动速度的大小及方向。其控制系统功能框图如图1所示。
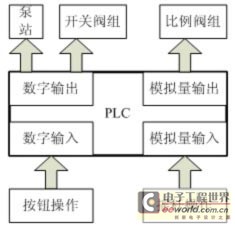
图1 机械手控制系统功能框图
在布线方便的情况下,按钮操作及摇杆操作的开关及比例信号可通过电缆直接输入到PLC的数字量及模拟量输入模块。这种方式结构简单、成本低、可靠性高,控制系统的硬件设计及软件编程极为简化。但在实际工业现场中,布线受到诸多限制,尤其是对于移动型设备,采用有线控制方式人员操作不够方便灵活。由于我们研制的机械手需要在轨道上长距离运动,且操作距离较远,因此必须采用无线遥控操作的方式。为此我们采用无线数传模块作为通信模块,并设计了基于16位单片机的手持式操作器,改进后的遥控型机械手控制系统总体功能框图如图2所示。无线数传模块成对使用,在手持操作器端和机械手本体上的控制系统端各有一块,分别完成数据的无线发送及接收功能。在控制系统需要的时候,也可以双向收发,即同一端的数传模块在数据接收和数据发送功能中切换。此时需要注意,数传模块的发送与接收功能的切换需要一定的时间。
手持操作器根据操作员对按钮及摇杆的不同操作,通过IO口及AD转换进行采集,采集后的信息进行数字编码后形成指令,以ASCII码的形式通过串口发送到无线数传模块,无线数传模块再将指令以无线方式发出;机械手上的控制系统的数传模块接收到发送来的指令编码后通过串口总线传送至PLC,PLC对指令编码进行解码,分解出不同的操作指令,然后进行逻辑运算,根据不同的指令得到不同的需要执行的动作,再通过数字输出和模拟输出控制相应的继电器或阀动作,从而实现对机械手各关节的远程无线操作。通过信号电缆连接到PLC的按钮操作输入及摇杆操作输入保留在机械手本体上,作为备份或检修使用。同时,在PLC数字输入口和手持操作器上均设置遥控操作切换按钮,可以进入或退出遥控操作模式。PLC上的按钮操作应具有更高的优先级。
由于摇杆操作采集的对象为摇杆的比例位置状态,它采用的是自动对中的设计的。因此在控制系统软件结构上,采用循环发送指令的方式。即进入无线控制状态后,手持操作器就定时地将采集到的状态发送出来,而不管此时有没有操作人员的操作输入。

图2遥控型机械手控制系统功能框图
手持操作器采用16位单片机,对检测到的按钮和摇杆操作进行数据编码后通过无线的方式发送至PLC,PLC对其解码后获得指令实现对机械手各关节运动的控制。该方案成本低,具有良好的通用性和可扩展性。
前言
可编程序逻辑控制器(ProgrammableLogicController,PLC)是一种适用性强的工业用控制器,广泛应用于各类工业生产线,移动机械设备的控制等环境较恶劣的工业场合。其工作性能稳定,可扩展性强,应用简便。根据不同的模块配置,可以进行逻辑及算数运算,对数字开关量、模拟量等进行控制和采集,同时具有丰富的总线接口形式,可以利用公开的协议与不同设备构成复杂的系统。在我们所研制的工业机械手中,各关节由比例阀或开关阀构成开环液压控制回路,实现比例调速或开关动作,因此我们选用了西门子的S7-200系列PLC作为其控制器。
在一些环境复杂的应用场合,尤其是对于移动机械设备,控制系统的布线受到诸多限制,操作人员与控制系统的位置安排不方便。因此,具有高度灵活性的无线遥控操作系统的应用得到了推广。目前工业上应用的无线遥控操作系统一般采用无线电数字传输方式。一些芯片厂商如Infineon、Micrel、RFMonolithics、Melexis、CML、ATMEL等也都推出了各种适应于不同场合和要求的RF芯片。
无线数传模块是一种集成式的专用于无线数据收发的模块,可直接通过数据总线与其它控制、采集等模块连接完成无线数据收发功能,广泛应用于工业遥控、遥测,无线抄表,自动化数据采集等场合。具有可靠性高,功耗低,协议透明使用方便等优点。传输距离可以达到几十至上百米,有些甚至可以到上千米的距离。目前很多厂商推出了工业化、系列化的产品,可以根据不同的使用场合和要求选择合适的产品。
目前一些厂家推出了专用的基于嵌入式处理器的工业用无线遥控器,其性能优异,集成度高。如HBC、JAY等,应用于混凝土泵车、装载机等场合。但由于其一般针对专用工程设备,不具有较好的通用性及可扩展性,且主要是国外厂家,价格高昂,其应用推广受到限制。
在我们研制的多关节工业机械手中,采用PLC作为其主控制器,完成对液压泵站和各关节液压阀的开关及比例控制,实现机械手的基本功能。采用无线数传模块通过无线通信方式收发数字信号,实现远程无线遥控功能,所设计的手持遥控器的输入开关量及模拟量由16位单片机采集并编码输出。
1.总体方案
该机械手用于巷道内进行混凝土喷浆作业,有自动和手动操作两种模式。自动模式下,PLC控制机械手各关节按程序预定的轨迹运动,调整机械手末端的方位与角度,使喷浆喷头按设定轨迹运动,且始终垂直于受喷的巷道面,完成巷道表面的喷浆作业。手动模式下,由操作员分别采用按钮和比例摇杆对开关阀和比例阀进行控制,驱动各关节运动,控制混凝土喷头的方位及角度。其中按钮控制泵站的启停及开关阀的方向切换,比例摇杆则根据操作人员的控制,形成一个±10V范围内的模拟量,比例阀根据模拟量的大小及方向,控制关节运动速度的大小及方向。其控制系统功能框图如图1所示。
图1 机械手控制系统功能框图
在布线方便的情况下,按钮操作及摇杆操作的开关及比例信号可通过电缆直接输入到PLC的数字量及模拟量输入模块。这种方式结构简单、成本低、可靠性高,控制系统的硬件设计及软件编程极为简化。但在实际工业现场中,布线受到诸多限制,尤其是对于移动型设备,采用有线控制方式人员操作不够方便灵活。由于我们研制的机械手需要在轨道上长距离运动,且操作距离较远,因此必须采用无线遥控操作的方式。为此我们采用无线数传模块作为通信模块,并设计了基于16位单片机的手持式操作器,改进后的遥控型机械手控制系统总体功能框图如图2所示。无线数传模块成对使用,在手持操作器端和机械手本体上的控制系统端各有一块,分别完成数据的无线发送及接收功能。在控制系统需要的时候,也可以双向收发,即同一端的数传模块在数据接收和数据发送功能中切换。此时需要注意,数传模块的发送与接收功能的切换需要一定的时间。
手持操作器根据操作员对按钮及摇杆的不同操作,通过IO口及AD转换进行采集,采集后的信息进行数字编码后形成指令,以ASCII码的形式通过串口发送到无线数传模块,无线数传模块再将指令以无线方式发出;机械手上的控制系统的数传模块接收到发送来的指令编码后通过串口总线传送至PLC,PLC对指令编码进行解码,分解出不同的操作指令,然后进行逻辑运算,根据不同的指令得到不同的需要执行的动作,再通过数字输出和模拟输出控制相应的继电器或阀动作,从而实现对机械手各关节的远程无线操作。通过信号电缆连接到PLC的按钮操作输入及摇杆操作输入保留在机械手本体上,作为备份或检修使用。同时,在PLC数字输入口和手持操作器上均设置遥控操作切换按钮,可以进入或退出遥控操作模式。PLC上的按钮操作应具有更高的优先级。
由于摇杆操作采集的对象为摇杆的比例位置状态,它采用的是自动对中的设计的。因此在控制系统软件结构上,采用循环发送指令的方式。即进入无线控制状态后,手持操作器就定时地将采集到的状态发送出来,而不管此时有没有操作人员的操作输入。
图2遥控型机械手控制系统功能框图
PLC 单片机 总线 无线电 自动化 嵌入式 继电器 汽车电子 电压 看门狗 相关文章:
- 基于ARM9和CPLD的输入输出系统设计(04-09)
- 在单个FPGA平台上采用多种工业以太网标准进行设计(03-13)
- CPLD器件在单片机控制器中的使用(07-24)
- 基于CPLD的电梯运行控制器的设计(10-10)
- PBGA向FBGA转变过程中的挑战(10-12)
- 基于梯形图VHDL的CPLD开发方法研究(11-07)