基于FPGA的二值图像连通域标记快速算法实现
时间:07-24
来源:互联网
点击:
4 实验结果与分析
图7、8、9、10给出对4幅384×288二值红外图像的标记结果,由于本文设计针对天空中飞行目标,因此剔除图像边缘(对于图像边缘的背景目标不标记,致为0值);统一了标记算法规则,减小了边缘背景对目标识别的影响。
图7、8、9、10所示均为在多云背景的天空中含有飞机编队,对于形状各异的云层具有复杂的复连通关系,产生复杂的等价表操作,最终被正确地赋予相同的标记。仿真结果相关数据示于表1。其中,FPGA工作时钟为100 MHz;n为连通区域个数;N(MAX)为最大临时标记;T1为TI公司的6416DSP通过传统的收敛标记算法执行时间;T2为TI公司的6416DSP通过本文设计的快速标记算法执行时间;T3为FPGA通过本文设计的快速标记算法执行时间。
仿真结果证明,传统的收敛标记算法以软件方式运行于TI公司DSP6416系统中时,算法处理速度不确定,取决于图像中连通域的形状和数量;本文中描述的二值分割图像标记快速算法以软件方式运行于TI公司DSP6416系统中时,算法处理384×288像素图像可以达到50帧的处理速度;但是,以FPGA实现该算法时,在100MHz工作时钟下,能够达到400帧/秒的处理速度。
表1 图像标记仿真结果对比

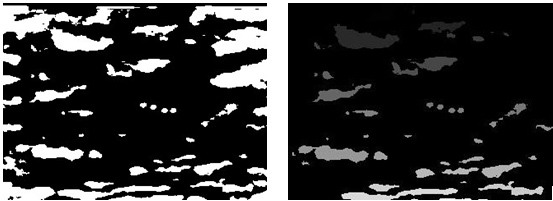
图7 含有4架飞机目标的二值红外图像和标记后的图像
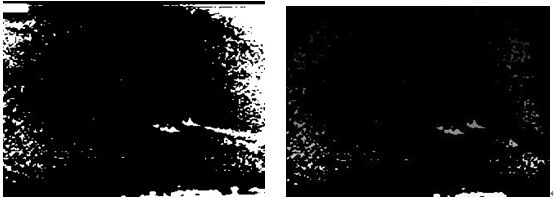
图8 含有2架飞机目标的二值红外图像和标记后的图像
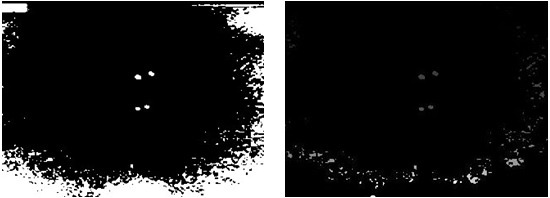
图9 含有4架飞机目标的二值红外图像和标记后的图像
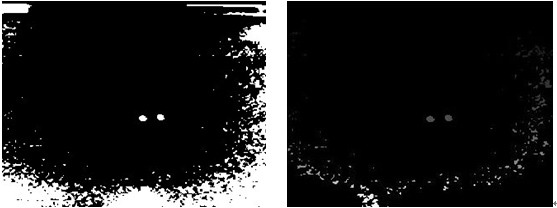
图10 含有2架飞机目标的二值红外图像和标记后的图像
图7、8、9、10给出对4幅384×288二值红外图像的标记结果,由于本文设计针对天空中飞行目标,因此剔除图像边缘(对于图像边缘的背景目标不标记,致为0值);统一了标记算法规则,减小了边缘背景对目标识别的影响。
图7、8、9、10所示均为在多云背景的天空中含有飞机编队,对于形状各异的云层具有复杂的复连通关系,产生复杂的等价表操作,最终被正确地赋予相同的标记。仿真结果相关数据示于表1。其中,FPGA工作时钟为100 MHz;n为连通区域个数;N(MAX)为最大临时标记;T1为TI公司的6416DSP通过传统的收敛标记算法执行时间;T2为TI公司的6416DSP通过本文设计的快速标记算法执行时间;T3为FPGA通过本文设计的快速标记算法执行时间。
仿真结果证明,传统的收敛标记算法以软件方式运行于TI公司DSP6416系统中时,算法处理速度不确定,取决于图像中连通域的形状和数量;本文中描述的二值分割图像标记快速算法以软件方式运行于TI公司DSP6416系统中时,算法处理384×288像素图像可以达到50帧的处理速度;但是,以FPGA实现该算法时,在100MHz工作时钟下,能够达到400帧/秒的处理速度。
表1 图像标记仿真结果对比
图7 含有4架飞机目标的二值红外图像和标记后的图像
图8 含有2架飞机目标的二值红外图像和标记后的图像
图9 含有4架飞机目标的二值红外图像和标记后的图像
图10 含有2架飞机目标的二值红外图像和标记后的图像
FPGA 红外 嵌入式 DSP 电路 Altera 仿真 相关文章:
- 基于FPGA的片上系统的无线保密通信终端(02-16)
- 基于Virtex-5 FPGA设计Gbps无线通信基站(05-12)
- 基于FPGA的DVI/HDMI接口实现(05-13)
- 基于ARM的嵌入式系统中从串配置FPGA的实现(06-09)
- 采用EEPROM对大容量FPGA芯片数据实现串行加载(03-18)
- 赛灵思:可编程逻辑不仅已是大势所趋,而且势不可挡(07-24)