PLL锁相环的基本结构及工作原理
振荡频率应随输入控制电压线性地变化。它输出的信号根据锁相环的不同要求,可分为正弦波压控振荡器与非正弦波压控振荡器两大类。
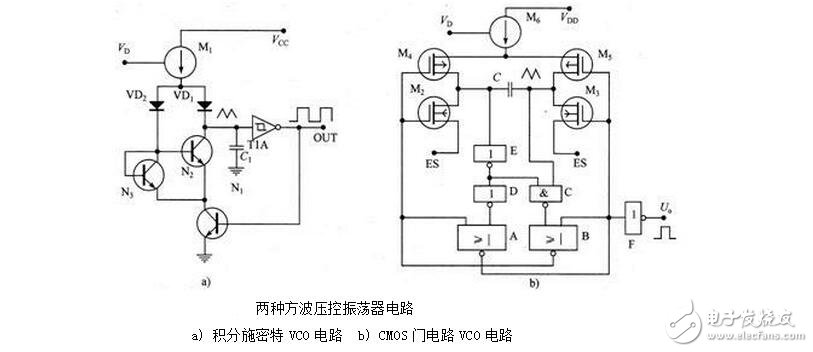
正弦波压控振荡器一般由LC点式振荡器与变容二极管组成.它的工作原理与计算公式和电容三点式正弦波振荡器完全一样。由于正弦波VCO受到变容二极管结电容变化范围的限制,因此一般振荡频率变化范围都不是太大。非正弦波压控振荡器的种类较多,由于它的频率变化范围大,控制线性好,所以应用比较广泛。这类压控振荡器常见的几种电路有射极定时压控多谐振荡器、积分型施密特压控振荡器、数字门电路压控振荡器。
图为两种方波压控振荡器电路。
三.环路滤波器
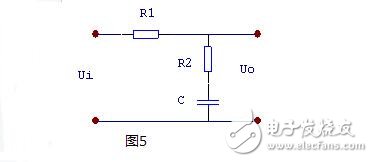
这里仅讨论无源比例积分滤波器如图5。其传递函数为:

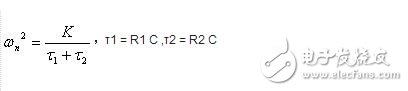
式中:τ1 = R1 C
τ2 = R2 C
图为目前比较常用的三种环路滤波器电路。从图中可以看出,三种电路的复杂程度不一样。第一种简单的RC滤波器所用元件最少,电路也最简单。有源比例积分滤波器,使用 元件最多,电路也比较复杂。
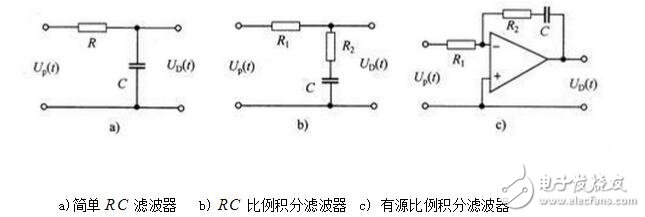
但从滤波效果的角度来衡量,有源比例积分滤波器的滤波效果最好,简单RC滤波器滤波效果最差,RC比例积分滤波器的滤波效果介于二者之间。设计电路时,可以根据锁相环路的要求选择不同的环路滤波器。
四.锁相环的相位模型及传输函数
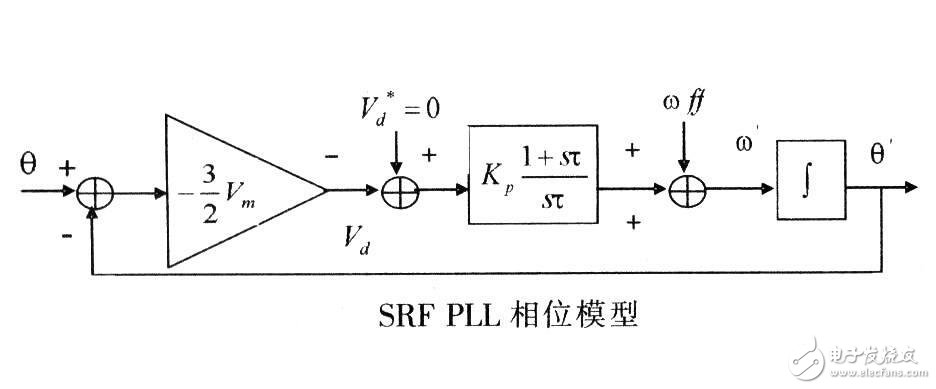
图为锁相环的相位模型。要注意一点,锁相环是一个相位反馈系统,在环路中流通的是相位,而不是电压。因此研究锁相环的相位模型就可得环路的完整性能。
由图6可知:
(1)当A点断开环路时,锁相环的开环相位传输函数为

(2)环路闭合时的相位传输函数为

(3)环路闭合时的相位误差传输函数为

当环路滤波器选用无源比例积分滤波器时,经推导可得:
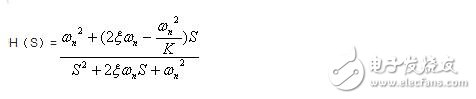
式中
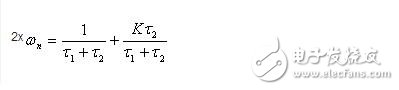
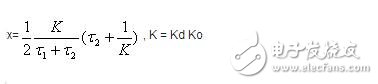
同样可得:
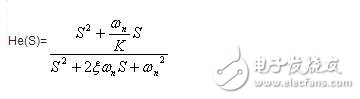
ωn称为系统的固有频率或自然角频率;
x 称为系统的阻尼系数。
要注意的是上面讨论中的ω指的是输入信号相位的变化角频率,而不是输入信号本身的角频率。如输入信号是调频信号,则ω指的是调制信号的角频率而不是载波的角频率。
五.锁相环的同步与捕捉
锁相环的输出频率(或VCO的频率)ωo能跟踪输入频率ωi的工作状态,称为同步状态,在同步状态下,始终有ωo = ωi。在锁相环保持同步的条件下,输入频率ωi的最大变化范围,称为同步带宽,用DωH 表示。超出此范围,环路则失锁。
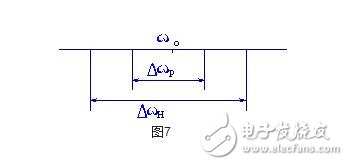
失锁时,ωo≠ωi,如果从两个方向设法改变ωi,使ωi向ωo靠拢,进而使Δωo =(ωi-ωo)↓,当Δωo小到某一数值时,环路则从失锁进入锁定状态。这个使PLL经过频率牵引最终导致入锁的频率范围称为捕捉带Δωp。同步带ΔωH,捕捉带Δωp 和VCO 中心频率ωo的 关系如图7。
- 小数分频与快锁芯片ADF4193的原理与应用(11-08)
- 全数字锁相环的设计及分析(03-01)
- 基于锁相环的频率合成电路设计(07-30)
- 锁相环中YTO自校准技术的应用(10-02)
- 基于DDS+PLL技术的频率合成器的设计(07-23)
- 锁相环在反馈电路上的应用(01-10)