怎样选择最优的 Buck 转换器拓扑?
摘要
基本的Buck转换器拓扑都是一样的,但控制该转换器工作的方法却是多种多样的,不同的方法带来不同的特性。与之对应的是现实中的负载特性也各自不同,如何将不同的转换器拓扑和各种不同的应用对应起来呢?了解各种拓扑的基本特性和限制,清楚自己的应用需求,这是实现正确选择的基本条件。
一、 概述
基本的 Buck 转换器拓扑是这样的:
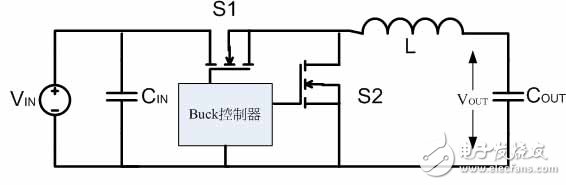
图一、Buck转换器的基本拓扑
在此拓扑中,高端功率开关S1和低端功率开关S2轮流导通,由此形成的斩波信号经电感L和输出电容COUT滤波以后形成输出电压,输出电压VOUT的高低由S1导通时间的占空比所决定。
一个完整的Buck系统需要对某些信号进行检测以确定如何对开关的占空比进行控制,而在电路中可供检测作为Buck控制系统的反馈信号是多种多样的,控制开关占空比的方法也有很多种。现实中的负载也各自具有独特的个性,它们对为之供电的Buck 转换器的特性要求也不一样,这就导致了各种不同控制架构的出现。
立锜科技的DC/DC产品目录中有多种不同类型的Buck转换器,它们分别使用了不同的控制架构。最传统的是电流模式(Current Mode, CM)和固定导通时间(Constant-On-Time, COT)模式,还有结合了两者特性的电流模式固定导通时间(Current Mode Constant-On-Time, CMCOT)模式,以及改进后的固定导通时间(Advanced Constant-On-Time, ACOT™)模式。这些不同的控制架构实现方法不同,各自具有不同的特性,其优势和限制也是各自不同的。
面对如此繁多的控制架构,我们应该怎样针对自己应用的需要选择合适的架构呢?让我们从了解开始。
二、 电流模式(Current Mode, CM)
最传统的电流模式Buck转换器通过对MOSFET功率开关的导通时间进行控制以实现对输出电压的调节,它有一个固定频率的内部时钟控制着开关的节奏,导通时间的决策依据来源于电感峰值电流检测信号和误差放大器的比较结果。下面是它的电路拓扑和与之对应的波形示意图:
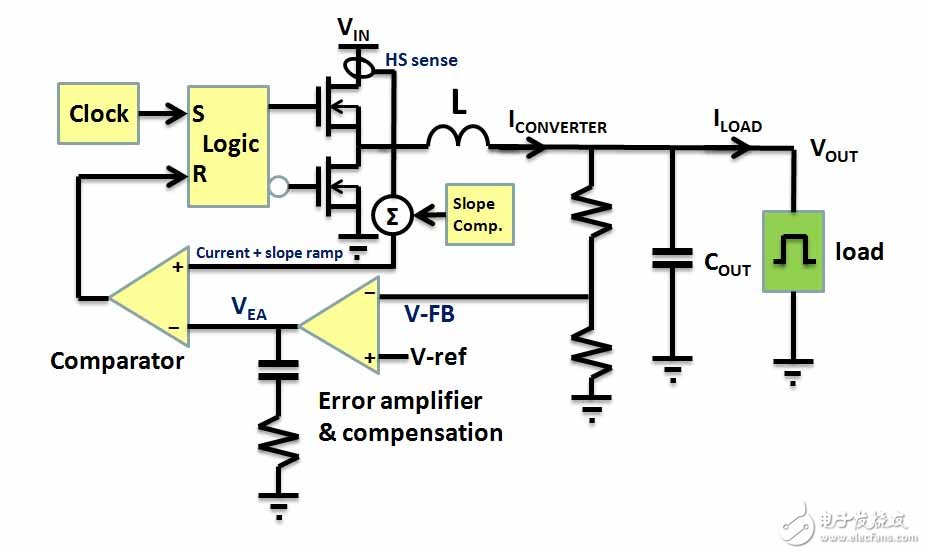
图二、电流模式Buck转换器电路拓扑
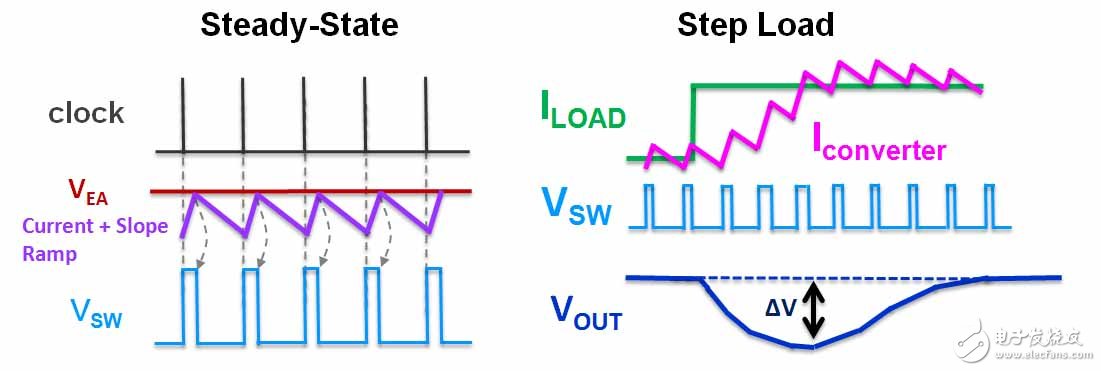
图三、电流模式Buck转换器的工作波形
这种架构的控制回路的带宽是由误差放大器进行设定的,一般被限定在远小于开关切换工作频率的水平上。
RT8059 是一款封装为TSOT-23-5的电流模式 Buck 转换器,最高工作电压为5.5V,输出电流能力为1A,以1.5MHz的固定频率工作。这是它的应用电路图:
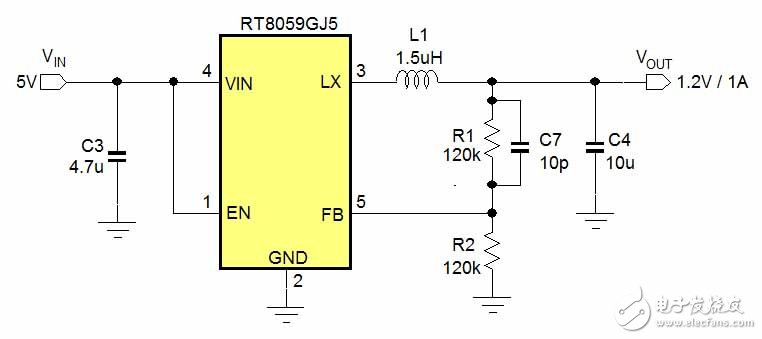
图四、电流模式Buck转换器的电路实例
---------------------------
更多电源技术热文可关注电子发烧友网最新出炉的2月份《电源技术特刊》

我们给它一个5V的电压,让它的输出电压为1.2V,并给它施加一个在500mA和1A之间快速变化的电流负载,看看它的输出电压变化情况。下图是测试波形:
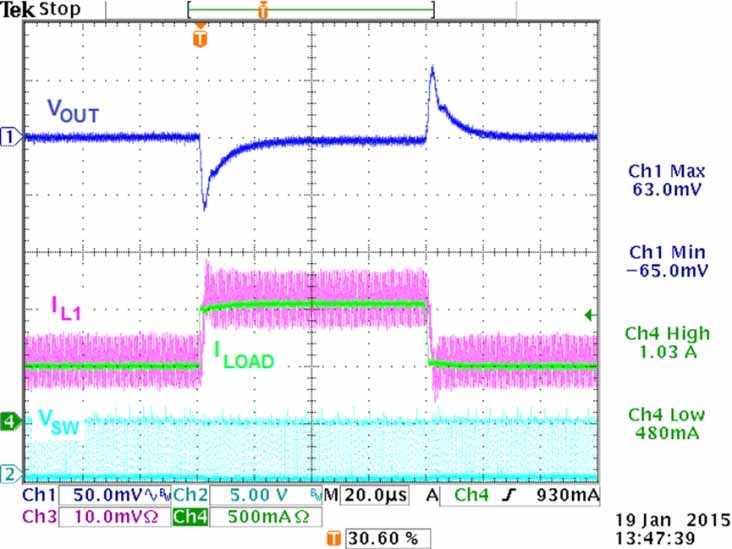
图五、电流模式Buck转换器的瞬态响应波形
将波形在时间轴上拉开以后,我们可以看到响应过程的细节:
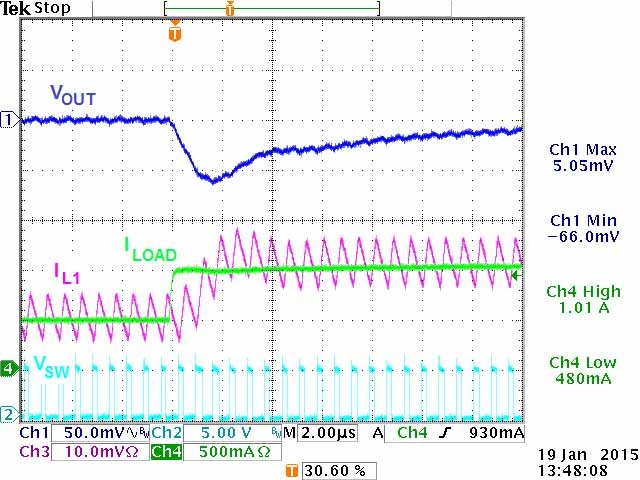
图六、电流模式Buck转换器的瞬态响应波形细节展开
当负载电流从500mA向1A跳变时,输出电压下跌的最大幅度是66mV,为额定输出电压的5.5%。这种负载快速变化条件下的输出电压变动状况测试是最能反映一个电源系统的性能的,因为这是它能遇到的最坏状况之一。
电流模式控制电路中的误差放大器能对输出电压的变化做出响应。由于输出电容的存在,负载电流的急速变化并不能马上反映到电压上,它只能逐渐地反映出来,这在误差放大器中表现为它的输出信号的逐渐增加,这个增加过程还受到补偿电路的抑制,以使得反应不至于太过。
误差放大器的输出的变化并不能马上表现到开关占空比的变化上,它需要受到时钟的同步,只有一个新的时钟周期开始时,高端开关才会被打开,这个打开过程直至内部的脉动信号幅度超过误差放大器输出信号幅度以后才会结束。较高的误差放大器信号输出导致较高的占空比,从输入端经电感流向输出端的电流相应更高以弥补输出电流增大带来的输出电压下降损失,反之亦然。
在稳定状态下,误差放大器的输出电压是稳定不变的,由此导致的占空比也是不变的,我们可在这个时候从开关节点上测量到稳定不变的波形。当任何扰动加入的时候,例如输入电压发生了变化,或是负载电流发生了变化,前述的动态变化过程就会发生,其最终目的就是将输出电压拉回到稳定状态,能用多快的速度将环境变化的影响消除反映了一个系统的瞬态响应的速度。
受较窄的系统带宽的限制,电流模式Buck转换器对负载的快速变化的响应是比较慢的,所以它的输出电压跌落和上冲就会比较大,恢复过程也要需要比较长的时间。
MOSFET功率开关 占空比 Buck转换器 相关文章:
- 50%以上占空比降压转换器下坡 (Downslope) 补偿(07-07)
- 数字电源UCD92xx输出电压波形的优化(06-18)
- 概述串联式开关电源的工作原理(09-15)
- 基于微处理器和PWM的交流可调稳压电源(06-14)
- 同步降压MOSFET电阻比的正确选择(06-20)
- 基于80C196的脉冲信号采集卡的设计(10-17)