带你深入了解调制器的特性与应用
虽然,许多有关调制的描述都将其描绘成一种乘法过程,但,实际情况更为复杂。
首先,为清晰起见,若信号Acos和未调制载波
Vo(t) = ½AsAc[cos((ωs + ωc)t) + cos(ωs – ωc)t))]
若载波Accos(ωct)幅度为1 V (Ac = 1),则该式进一步简化为:
Vo(t) = ½As[cos((ωs + ωc)t) + cos((ωs – ωc)t)]
但在大多数情况下,调制器是执行此功能更好的电路。调制器(用来改变频率的时候也称为混频器)与乘法器密切相关。
-
乘法器的输出是其输入的瞬时积。
-
调制器的输出是该调制器其中一路输入的信号(称为信号输入)和另一路输入的信号符号(称为载波输入)的瞬时积。
图1所示为调制函数的两种建模方法:
-
作为放大器使用,通过载波输入上的比较器输出切换正增益和负增益;
-
作为乘法器使用,并在其载波输入和其中一个端口之间放置一个高增益限幅放大器。
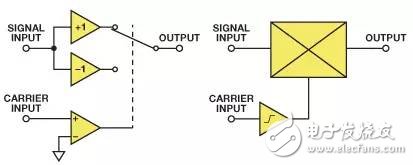
图1. 调制函数的两种建模方法
两种架构都可用来形成调制器,但开关放大器架构(用于AD630平衡调制器中)运行较慢。大多数高速IC调制器含有一个跨导线性乘法器(基于吉尔伯特单元),并在载波路径上有一个限幅放大器,用来过驱其中一路输入。该限幅放大器可能具有高增益,允许低电平载波输入——或者具有低增益和干净的限幅特性,从而要求相对较大的载波输入以正常工作。
出于某些原因,我们使用调制器而非乘法器。乘法器的两个端口均为线性,因此载波输入的任何噪声或调制信号都会与信号输入相乘,降低输出;同时,大多数情况下可忽略调制器载波输入的幅度变动。二阶特性会导致载波输入的幅度噪声影响输出,但最好的调制器都会尽可能减少这种影响,因此不纳入本文的讨论范围。简单的调制器模型使用由载波驱动的开关。
(理想)开路开关具有无限大的电阻和零热噪声电流,且(理想)闭路开关具有零电阻和零热噪声电。因此,虽然调制器的开关并非理想,但相比乘法器而言,调制器依然具有较低的内部噪声。另外,比起乘法器,设计与制造类似的高性能、高频率调制器也更为简便。
与模拟乘法器相同,调制器将两路信号相乘;但与模拟乘法器不同的是,调制器的乘法运算是非线性的。当载波输入的极性为正时,信号输入乘以+1;而当极性为负时,则乘以–1。换言之,信号乘以载波频率下的方波。
频率为ωct 的方波可使用傅里叶序列的奇次谐波表示:
K[cos(ωct) – 1/3cos(3ωct) + 1/5cos(5ωct) – 1/7cos(7ωct) + …]
对该序列求和:[+1, –1/3, +1/5, –1/7 + ...] 为 π/4。因此,K数值为4/π,这样当正直流信号施加到载波输入时,平衡调制器可作为单位增益放大器使用。
载波幅度并不重要,只要它足够大,可驱动限幅放大器即可;因此,由信号Ascos(ωst)和载波 cos(ωct)驱动的调制器产生的输出即为信号与载波平方的乘积:
2As/π[cos(ωs + ωc)t + cos(ωs – ωc)t –
1/3{cos(ωs + 3ωc)t + cos(ωs – 3ωc)t} +
1/5{cos(ωs + 5ωc)t + cos(ωs – 5ωc)t} –
1/7{cos(ωs + 7ωc)t + cos(ωs – 7ωc)t} + …]
该输出包含下列项的频率之和与频率之差:信号与载波、信号与载波的所有奇次谐波。理想的完美平衡调制器中不存在偶次谐波乘积。然而在真实调制器中,载波端口的残余失调会导致低电平偶次谐波乘积。在许多应用中,低通滤波器(LPF)可滤除高次谐波乘积项。请记住,cos(A) = cos(–A), 因此 cos(ωm – Nωc)t = cos(Nωc – ωm)t,并且无需担心"负"频率。滤波处理后,调制器输出可计算如下:
2As/π[cos(ωs + ωc)t + cos(ωs – ωc)t]
它和乘法器输出的表达式一致,只是增益稍有不同。在实际系统
- 方便工程师更灵活更方便设计电源的解决方案(04-10)
- 低功率IQ调制器的基带设计实例—电路精选(1)(10-14)
- 射频微波放大器简述及设计思路(08-26)
- 一种低压高线性CMOS模拟乘法器设计(04-01)