机器人技术电路设计图集锦
时间:10-21
来源:网络整合
点击:
U2A为 74ALS00与非门,control_port(控制端口)引脚为控制口,当control_port为高电平时,超声波换能器发射超声波信号。
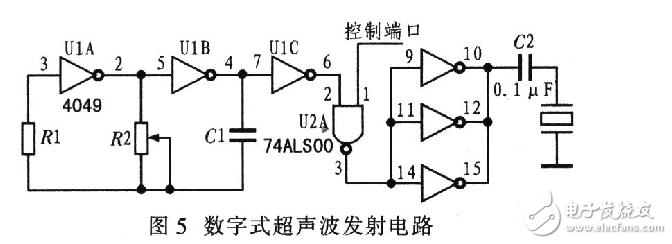
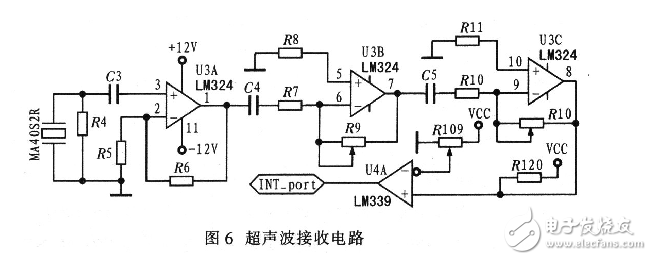
图6示出为超声波接收电路。超声波接收换能器采用MA40S2R,对换能器接收到的信号采用集成运算放大器LM324进行信号放大,经过三级放大后,通过电压比较器LM339将正弦信号转换为TTL脉冲信号。INT_Port与单片机中断管脚相连,当接收到中断信号后,单片机立即进入中断并对超声波信号进行处理和判断。
光电检测模块设计
设计光电检测模块,使机器人能够检测地面上的白色引导线。光电检测电路主要包括发射部分和接收部分,其原理如图3所示。发射部分的波形调制采用了频率调制方法。由于发光二极管的响应速度快,其工作频率可达几兆赫兹或十几兆赫兹,而检测系统的调制频率在几十至几百千赫兹范围之内,因此能够满足要求。光源驱动主要负责将调制波形放大到足够的功率去驱动光源发光。光源采用红外发光二极管,工作频率较高,适合波形为方波的调制光发射。
接收部分采用光敏二极管接收调制光线,将光信号转变为电信号。这种电信号通常较微弱,需进行滤波和放大后才能进行处理。调制信号的放大采用交流放大形式,可以将调制光信号与背景光信号分离开来,为信号处理提供方便。调制信号处理部分对放大后的信号进行识别,判断被检测对象的特性。因此,该模块的本质是将"交流" 的、有用的调制光信号从"直流"的、无用的背景光信号中分离出来,从而达到抗干扰的目的。
更多机器人技术资料,电路图及DIY设计,可参见本期Designs of week——当中国制造遇上机器人技术,设计思维请跟上!

- 盘点:那些为健康而生的APP与智能硬件(11-24)
- 指尖的密码!手指静脉识别鼠标问世(02-02)
- WLAN射频优化的解决方案设计详解(03-03)
- 智能鞋垫:解决跑步者的膝伤问题(02-12)
- 混合动力汽车系统结构大盘点TOP3(03-14)
- 盘点STM32-NUCLEO开发与仿真平台(03-28)