机器人技术电路设计图集锦
命令。
电源是保证机器人稳定、可靠运行的关键部件,它直接影响着机器人性能的好坏。由于本机器人电机驱动和控制器采用两种不同等级电压的电源,为避免2个电源相互干扰,本机器人采用双电源供电系统:电机电源采用高放电倍率聚合物锂电池,容量为2 500 MAH,工作电压为24 V,能提供40 A的稳定供电电流,是普通电池的10倍;控制器电源采用8.4 V锂电池,并提供电压采样端口,以供电池检测,电路图如图2所示。
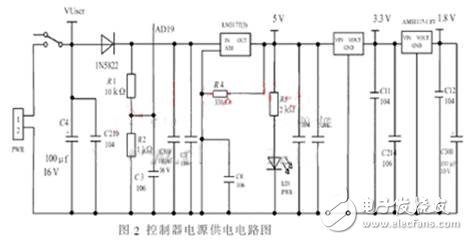
为获得CPU各端口电路所需要的不同等级的电压,本设计采用 1个LM317T三端稳压器和2个AMS1117低压差线性电压调整器,并通过其附属电路,得到精确稳定的5 V、3.3 V、1.8 V 三种电压;采用1个发光二极管LD1和限流电阻R5作为电源指示灯,以显示电源开关的状态;为实时采样电源电压,防止锂电池过放或过充,设计中通过R1、 R2分压,引出AD19端口作为电源采样端口。
直流电机驱动电路设计
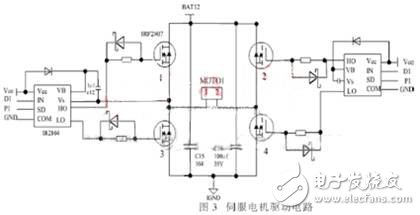
由于电机功率较大,并要求能实现双向、可调速运行,本文设计了半桥式电力MOSFET管,成功实现了对电机的控制。如图3所示,2路PWM信号通过 IR2104半桥驱动器(half-bridge driver)和相应保护电路连接至型号为IRF2807 的MOSFET管,控制电源与电动机连接线路的通与断,达到控制电机速度的目的。当PWM信号占空比较大时,线路导通时间长,电机速度大;相反,当PWM 占空比较小时,线路导通时间短,电机速度小。4个MOSFET管在不同时刻导通组合,实现控制电机转动方向:当MSFET管1和4导通时,电机端口1为正、2为负,电机正转;当MOSFET管2和3导通时,电机端口2为正、1为负,电机反转。
远红外火焰传感器组电路设计
为能完成灭火任务,机器人必须能确定火焰的大致位置,并能对火焰是否被扑灭做出判断。本文设计了由28个红外接收管组成的2个远红外火焰传感器组,前后每个方位各有14个红外接收管组成,每2个并联并指相同一个方向,2个传感器组共指向14个方向,可以覆盖360°范围。如图所示,14个端口通过 CD4051八路转换开关连接至ATMEGA8—16PC单片机,其中 SCK、MISO、MOSI为位选择端口。此外,本设计还可以通过对14路读取数据进行比较,从而确定其最大最小值及相应端口值,方便火源方位的确定。
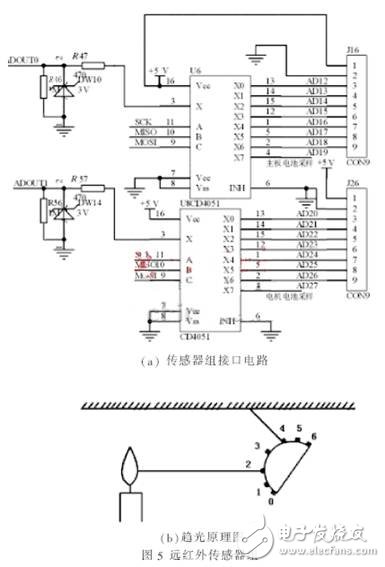
通过对远红外传感器组的不同端口值的比较,还可以确定机器人和火源的相对位置,以判断前进方向,完成趋光动作。当机器人与火源相对位置如图5(b)所示时,可以读取端口2和端口4的值,并进行作差,端口2的值大于端口4(说明2更靠近火源),则执行左拐命令,使其差值在一定范围内,然后执行直行命令趋近火源。
TOP4 配套Lego组合机器人的超声波防撞电路设计
地面灰度传感器电路设计
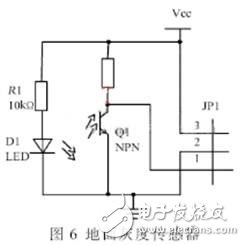
如图所示,地面灰度传感器通过发光二极管LED照亮地面,地面的反射光线被光敏三极管接收,当地面颜色为黑色时,反射的光线比较弱,则光敏三极管的基极电流越小,集电极电流也相应较小,1端口电压值较高,其测量值较大;反之当地面为白色时,反射的光线较强,集电极电流越大,1端口电压值较小,测量值也较小。
本文研究并设计了基于ARM9嵌入式系统的一种智能灭火机器人,具有以下5个创新点:(1)采用了嵌入式系统内核,大大提高了机器人处理信号的能力;(2) 双电源供电系统引入,使机器人的运行更加稳定可靠;(3) 采用PWM信号控制大功率直流电机,在速度和精度方面有了很大的改进;(4)通过合理选择PSD测距传感器的个数和安放位置,既满足比赛要求,又能节约成本;(5)本文设计的远红外火焰传感器组,很好地完成了对火源的精确定位任务,提高了灭火可靠性和快速性。实测证明,本文设计的机器人能够很好地完成比赛任务,并且在可靠性和速度方面都有了大幅度的提高,具有很强的应用价值。
机器人的超声波防撞电路设计
这种探测器的依据是超声波具有很强的方向性。发送的传感器发出连续信号。在这个装置之前约几米的适当物体可以把相当强的信号反射回到接收传感器。发送和接收传感器只相隔大约50毫米,所以方向性强的超声波保证从发射器到接收器之间的直接耦合波显得微不足道。这个电路从RCX装置获得电源,它就和一种标准Lego探测器一样连接到RCX装置的一个输入端口。并没有特别支持采用RCX代码或者 Mindstorms套件通常共用的其他编程语言的超声波探测器。因此,可以利用软件以标准有源探测器。例如Lego光探测器的相同基本方式操纵它。
图中是超声波探测器的整个电路图。二极管列阵由D1至D6组成,而标准的桥式整流器则由D1至D4组成。这个整流器连同滤波电容C3产生
- 盘点:那些为健康而生的APP与智能硬件(11-24)
- 指尖的密码!手指静脉识别鼠标问世(02-02)
- WLAN射频优化的解决方案设计详解(03-03)
- 智能鞋垫:解决跑步者的膝伤问题(02-12)
- 混合动力汽车系统结构大盘点TOP3(03-14)
- 盘点STM32-NUCLEO开发与仿真平台(03-28)