赛灵思FPGA DIY系列(1):车牌号定位与识别系统
(B+G+R)/3 (2)
3.3 预处理及边缘提取
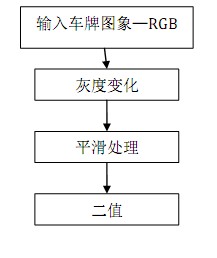
图2 预处理及边缘提取流程图
3.4 平滑处理
对于受噪声干扰严重的图象,由于噪声点多在频域中映射为高频分量,因此可以在通过低通滤波器来滤除噪声,但实际中为了简化算法也可以直接在空域中用求邻域平均值的方法来削弱噪声的影响,这种方法称为图象平滑处理。例如,某一象素点的邻域S 有两种表示方法:8邻域和4邻域分别对应的邻域平均值为


其中,M 为邻域中除中心象素点f(i,j) 之外包括的其它象素总数,对于4邻域M=4,8 邻域M=8。然而,邻域平均值的平滑处理会使得图象灰度急剧变化的地方,尤其是物体边缘区域和字符轮廓等部分产生模糊作用。为了克服这种平均化引起的图象模糊现象,我们给中心点象素值与其邻域平均值的差值设置一固定的阈值,只有大于该阈值的点才能替换为邻域平均值,而差值不大于阈值时,仍保留原来的值,从而减少由于平均化引起的图象模糊。
由上图可以归纳起来以下方面:原始图像清晰度比较高,从而简化了预处理,结合MATLAB实验过程,得出不是每一种图像处理之初都适合滤波和边界增强。本次汽车车牌的识别,为了保存更多的有用信息。
3.5 牌照的定位
牌照的定位和分割是牌照识别系统的关键技术之一,其主要目的是在经图象预处理后的原始灰度图象中确定牌照的具体位置,并将包含牌照字符的一块子图象从整个图象中分割出来,供字符识别子系统识别之用,分割的准确与否直接关系到整个牌照字符识别系统的识别率。由于牌照图象在原始图象中是很有特征的一个子区域,确切说是水平度较高的横向近似的长方形,它在原始图象中的相对位置比较集中,而且其灰度值与周边区域有明显的不同,因而在其边缘形成了灰度突变的边界,这样就便于通过边缘检测来对图象进行分割。
自然环境下,汽车图像背景复杂、光照不均匀,如何在自然背景中准确地确定牌照区域是整个识别过程的关键。首先对采集到的视频图像进行大范围相关搜索,找到符合汽车牌照特征的若干区域作为候选区,然后对这些侯选区域做进一步分析、评判,最后选定一个最佳的区域作为牌照区域,并将其从图象中分割出来。流程图如下:

图3 牌照的定位流程图
3.6 牌照字符分割
完成牌照区域的定位后,再将牌照区域分割成单个字符,然后进行识别。字符分割一般采用垂直投影法。由于字符在垂直方向上的投影必然在字符间或字符内的间隙处取得局部最小值的附近,并且这个位置应满足牌照的字符书写格式、字符、尺寸限制和一些其他条件。利用垂直投影法对复杂环境下的汽车图像中的字符分割有较好的效果。流程图如下

图4 牌照字符分割流程图
3.7 字符的分割与归一化
一般分割出来的字符要进行进一步的处理,以满足下一步字符识别的需要。但是对于车牌的识别,并不需要太多的处理就已经可以达到正确识别的目的。在此只进行了归一化处理,然后进行后期处理。

图5 字符分割与归一化流程图
3.8 字符的识别
字符的识别目前用于车牌字符识别(OCR)中的算法主要有基于模板匹配的OCR算法以及基于人工神经网络的OCR算法。基于模板匹配的OCR的基本过程是:首先对待识别字符进行二值化并将其尺寸大小缩放为字符数据库中模板的大小,然后与所有的模板进行匹配,最后选最佳匹配作为结果。模板匹配的主要特点是实现简单,当字符较规整时对字符图像的缺损、污迹干扰适应力强且识别率相当高。综合模板匹配的这些优点我们将其用为车牌字符识别的主要方法。
模板匹配是图象识别方法中最具代表性的基本方法之一,它是将从待识别的图象或图象区域f(i,j)中提取的若干特征量与模板T(i,j)相应的特征量逐个进行比较,计算它们之间规格化的互相关量,其中互相关量最大的一个就表示期间相似程度最高,可将图象归于相应的类。也可以计算图象与模板特征量之间的距离,用最小距离法判定所属类。然而,通常情况下用于匹配的图象各自的成像条件存在差异,产生较大的噪声干扰,或图象经预处理和规格化处理后,使得图象的灰度或像素点的位置发生改变。在实际设计模板的时候,是根据各区域形状固有的特点,突出各类似区域之间的差别,并将容易由处理过程引起的噪声和位移等因素都考虑进去,按照一些基于图象不变特性所设计的特征量来构建模板,就可以