萌版蜘蛛侠:爬墙机器人DIY作品秀
想挣脱地心引力的束缚?想练习跑酷在垂直的墙壁上疾走?——不要用崇拜的目光注视我,虽然我就是飞檐走壁,仁者无敌的可爱玲珑Wallbots!当然我也不介意你称呼我的艺名:【蜘蛛侠】

墙面上爬来爬去的是神马?!莫要惊慌,既不是壁虎也不是变异蜘蛛,它们是可爱的Wallbots——能在垂直表面进行穿越的机器人。想知道怎么制作?嗯哼,往下看吧~小W可以在任何含金属墙面上移动,包括电梯,白板,冰箱、金属门。 小W还配备了几个光传感器,通过它们可以进行简单的交互。 3种模式可供选择,通过光传感器进行转换: 红色走得快,趋近障碍物(例如人的手或者小W的兄弟姐妹们); 绿色走得慢,远离障碍; 黄色走得最慢,检测到物体时完全停止。
1 工具和材料

● 一些不易弯曲的硬线
● 绝缘胶布
● 线
● 硬板纸
● 胶棒
● 热胶q1an9
● 剪刀
● 剪钳(绞线的那个)
●2.2K欧姆电阻*4
● 10K欧姆电阻
● 100欧姆电阻
● Arduino Mini(单片机)
● 伺服电机*2
● 磁铁片*6
● 1个RGB LED灯
● 1个轻型的电池
2. 使伺服电机连续运转之入门篇

● 把固定它的壳子打开,对每个伺服机做简单修改就能得到我们需要的连续转动,先撬开壳子。

● 把妨碍转动的壳子剪掉,这样电位计就能一直获得连续信号。
● 这个黑色的部分是用来让它转了180度后停止的,看见没?两个黑色塑料小片儿。

● 取下齿轮
● 把黑色壳子上的线剪下(下一个大步会告诉你怎么处理它们)。

● 把挡着连续转动的小塑料片儿剪掉。
3 使伺服电机连续转动之进阶篇

● 现在,电位计已被成功调戏~(≧▽≦)/~,她一直采集连续信号。
● 从黑壳子上剪出红色,绿色和黄色的线(这个应当在上一步就做好了)。

● 绿色的线和黄色线之间焊个2.2K的电阻
● 在红色和黄色的线之间也焊个2.2K的电阻
4 反向设置

● 在相同模拟信号下,伺服机的转向一般是相同的。他们对称安装在小W上,但是要让一个反向怎么办?在硬件和软件上都可以解决(我用硬件做的,因为我是代码懒人,摔!)。
● 剪下电机到电机板子上的红色和蓝色的线。
● 焊接红线到蓝线,然后蓝线到红线(头晕了吧?其实就是像图上那样交叉一下)。
5 组装电机

● 这步很容易嘿!尽可能温柔滴把线塞到伺服机壳子里面,然后把齿轮装配好。可是捏,我加了电阻后,以前的壳子就不合适了,所以我用绝缘胶布把他们缠在一块儿的。
6 齿轮上阵

● 怎么附上去呢?我用的热胶,其实任何粘性强的玩意儿都可以使,先剪两根1英寸长的硬线。

● 把每根线用热胶粘在伺服机顶部的齿轮里面。线要对半,露一半出来!

● 在每根线的末端粘3个磁盘。磁盘也必须是对准中心!
7 伺服机与单片机对接

● 我用PIN 9和 PIN 10来驱动电机。
● Pin 9 -》伺服机1的橙线。
● Pin 10 -》伺服机2的橙线
● Ground -》伺服机1,2的黑线。
● VCC -》伺服机1,2的红线。
8 接光敏电阻

● 把每个光敏电阻(光传感器)都连到Arduino上,一共4个传感器,左、右、前、后。
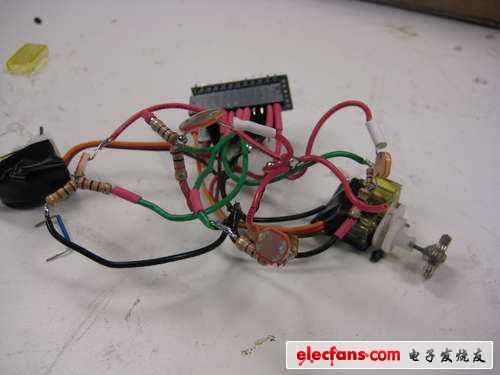
● 每个光传感器的电路图下面有,传感器的一条线连接到VCC;另一条线连到10K和100欧姆的电阻上。10K电阻接地,100欧姆电阻连接输入端。每个传感器的输入(绿线)连到MINI上的模拟端口(A0,A1,A2,A3)。

● 我程序里是这样设置的:Analog 0 -》 顶部的传感器;Analog 1 -》 左边的传感器;Analog 2 -》 前面的传感器;Analog 3 -》 右边的传感器。
9 加上RGB LED灯

● 把每个光敏电阻(光传感器)都连到Arduino上,一共4个传感器,左、右、前、后。
● 你是不是想在每个端口和LED灯之间放个电阻(200 欧姆左右)?我没有酱紫,因为我的LED灯可以承受的电压比Arduino能提供的高得多,所以不会被烧。
10 安装电池● 其实捏,能提供3—4V的电池都可以用,越轻越好。我使用了sparkfun锂电池。接地,然后高压直接接Arduino的VCC口。
11 上程序!● 这代码是关于2个伺服电机根据4个光传感器的输入值而进行驱动。根据模式,有几种运动方式。
*/
#include 《Servo.h》
// Right and left servos
Servo servo1;
Servo servo2;
// Light Sensors
int topSensor = 0; //700
int leftSensor = 1; /// Threshhold is 400
int frontSensor = 2; //400
int ri
- 先进手术系统所需的独特电源需求,凌力尔特来接招(10-11)
- 3G/WIFI控制太阳能驱动机器人制作详解(10-28)
- 超声波移动机器人导航设计方法(04-11)
- ROCKWELL系统在机器人汽车焊装线上的应用(07-07)
- 智能机器人在家庭医疗保健的设计和应用(09-19)
- 基于DSP和机器人的声控系统设计与实现(02-21)