3G/WIFI控制太阳能驱动机器人制作详解
将最近做的一个基于WIFI,3G控制的四轮驱动机器人拿出来与大家分享一下!轮子是由一个铝合金外罩,内部嵌入钢轮,再连接减速电机,轮子的外面很清晰的可以看是有橡胶用502粘起来,效果不错哦。
这个四轮驱动机器人的底盘完全由手工打造,无论是轮子还是底盘,大家可以看看图哦
将最近做的一个基于WIFI,3G控制的四轮驱动机器人拿出来与大家分享一下!
轮子是由一个铝合金外罩,内部嵌入钢轮,再连接减速电机,轮子的外面很清晰的可以看是有橡胶用502粘起来,效果不错哦。

下面介绍一下机器人的功能:
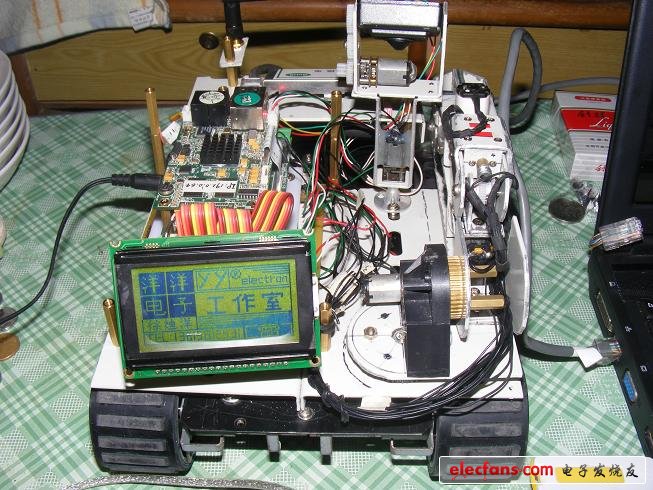
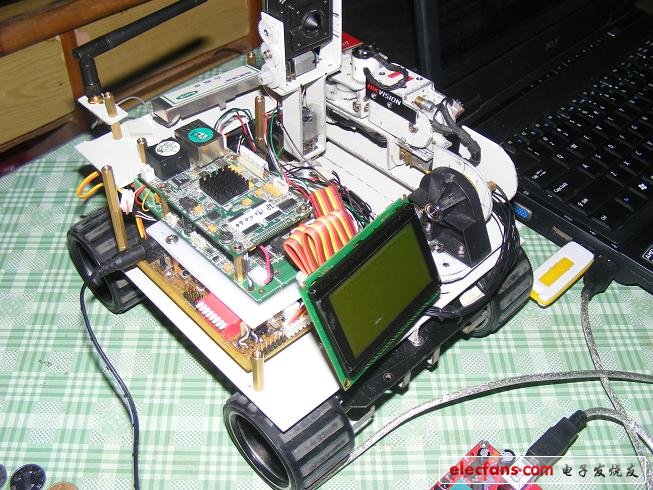
这是一个无线远程端控制型四轮驱动机器人,带有水平垂直控制云台,云台上搭载一个豆干摄像头,3.6MM镜头,可以看到较广的视野。3度机械手,可以实现较难度的控制,
搭载一个12864控制显示液晶模块。

外加一个无线网卡实现无线控制。实现寻迹、前后四方向自动壁障,太阳能充电,16.5V电池管理和编程自动化等功能。

虽然自动寻迹,自动壁障,太阳能充电,还没做,不过都是简单的几个功能。
下面详细介绍各部分
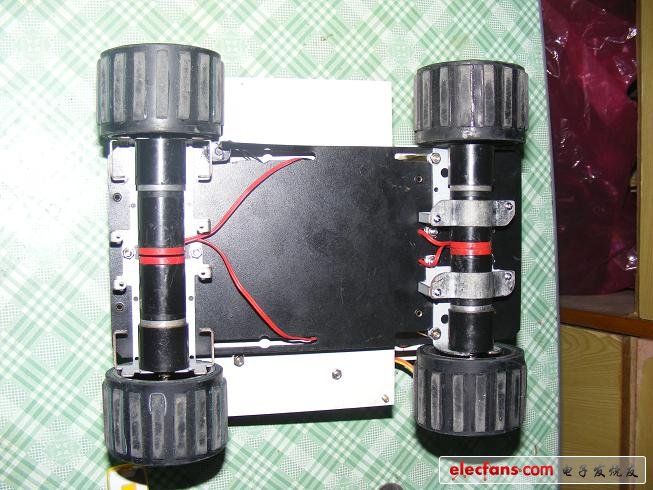
我喜欢而且最费时间的是底盘部分,毕竟基础一定要打好,不然会翻车哦,底盘很重,完全有金属打造,轮子外圈采用中空铝合金,由于里面是中空的,所以得装中心轴,而中心轴采用经过打磨的纯钢圈,再里面是铜轴与减速电机连接,所以较复杂也费时间。底盘面也采用钢板构架。与电机固定的是铁支架,所以整套底盘完完全全由钢铁制作。减速电机的速度为30圈每分钟。速度不是很快,但很精确。



机械手的结构足足花了我半个月的时间,其主要材料采用铝合金,因为铝合金的材质很轻,且质量较硬。所以做机械手是最合适的,上面的每一个结构和关节都由手工打磨而成。花费了不少时间和精力,毕竟要在图纸上设计机械手的结构和相关参数。而机械手的动力也采用减速电机来做,而不用舵机。舵机打算在改进后设计。这只机械手有3个垂直水平关节结构和一个夹手。里面都设计了一个方向接触式传感器,可控制机械手的伸缩角度。摄像头云台也采用减速电机设计,外铝合金构架。

上面搭载的摄像头为480线的模拟豆干。再经过齿轮的减速可以将摄像头转动速度降低。提高图像稳定性。无线网卡为了防干扰再外面加了个铁罩。外面引了一个外置天线,一般无线传输距离室内100米左右。

控制显示采用的是12864液晶模块,这种模块使用很是方便,也效果也好,亮度,灰度可调,可显示16*16的字体,也可以显示黑白图片。不带字库。

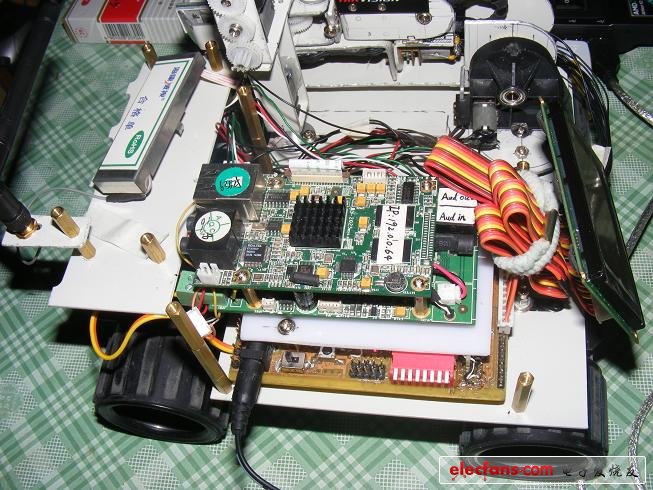
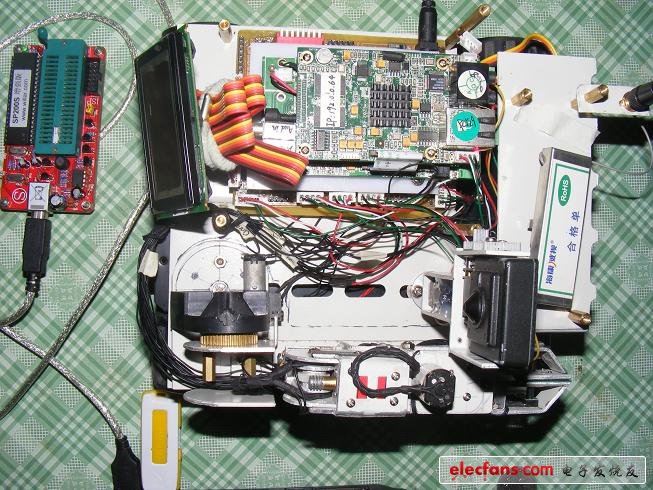
接下来也是最重要的电路部分了,由于我把它们装在了一起,拆下来很麻烦,所以就整体拍了,电路板最下面一层是我自己做的电路板,采用双层覆铜板,用激光打印机进行热转印腐蚀出来的,主要的单片机采用AT89S52这种常用且低廉的单片机。8K容量。虽然如果搞全自动智能控制可能空间不够,但简单的也足以,再改进型中将会使用STM32,大大加强功能。次电路板包含IO口的扩展,电源部分,16双路电机驱动部分,可以控制16个电机。串口输入输出接口,12864液晶功能。485电路,外部315遥控器电路。外部16路传感器输入端,可以检测16个传感器,红外,超声波等。外加3路独立的控制I0。可以控制探照灯的开和关。等等其他。上面两块为网络模块,通过此模块与无线网卡的链接与无线路由器链接,无线路由器再链接到笔记本电脑上,实现笔记本远程端控制机器人功能,电脑发送的指令经过电脑的无线网卡发给路由器,再由路由器发给机器人的无线网卡接收,网卡接收后有网络模块解码成232串口信号,在通过芯片转485给控制模块,控制模块将485通过电平转换芯片变成232给单片机,通过单片机解码成相应的控制指令。而机器人的视频信号通过无线网络模块传给路由再给电脑的远程视频控制软件接收。当把远程视频客户端中的对讲打开后可以监听机器人通过麦克风捕捉到的音频信号,实现远程监听功能。
机器人的电力系统采用两个16.5V,3A的锂电池供电,续航能力高达7个小时,连续航7小时,当你不控制的时候可以通过客户端控制进入省电模式,关闭相关功能,比如摄像头,探照灯等。当没电的时候可以通过寻迹功能自动行驶到充电的地方自动充电。
12864液晶显示模块会显示机器人相关的信息,包括电池监控,机械手状况,前方是否有障碍等等。
扩展可以在电路板上面加装太阳能电池,以增强机器人的续航能力。
如果将机器人接入外网,也就是广域网访问局域网
- 3G与wifi监控的对比(09-07)
- 牛人造大型无人巡逻车详细讲解(10-29)
- iPad2操控Wifi精确遥控飞行器(10-30)
- 人性化的低功耗WIFI智能温控器应用方案(08-17)
- 基于无线移动技术的移动医疗应用(09-24)
- 基于WIFI技术的医疗监控系统(03-29)