为什么总说VR定位动捕技术难 它究竟难在哪里?
时间:04-20
来源:雷锋网
点击:
积有限,因此,定位空间受到激光射程的限制,一般在5*5*2m范围左右。这就使得激光定位技术做大范围的应用难度非常高,使用受限。
为了解决这一问题就必须采取扩展方案,即将多个这样的5*5*2m连接在一起形成一个大范围的定位应用,如下图:
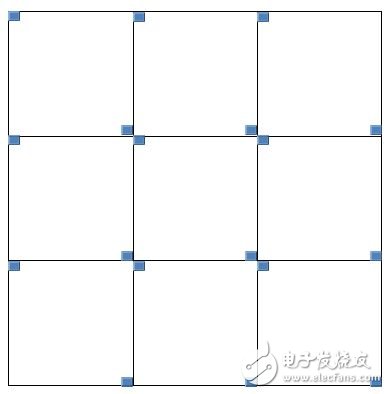
图中蓝色模块代表激光发射基站,每个子定位区间有两个激光发射基站,扩展方案即是复制多个子定位区间。
可是这又涉及到全局定位这一难题,即需要将各个子空间的坐标系下的定位转换成全局坐标系下的定位。此外由于光塔过多会产生相互干扰,因此不可随意增加定位光塔的数量来扩展定位空间。目前国内采用激光定位技术的公司,G-Wearables算是其中一家,他们宣称在Step VR产品上对原有的激光定位技术做改进,其中就包括扩展,等该公司提供技术支持的体验店开业后,或许可以去验证一下扩展效果。
除此之外,定位及动作捕捉技术还存在延时、硬件限制等难题。
VR才刚刚起步,想要走得越远就必须面对并解决这些定位及动捕技术中存在的难题。当然,作为一位VR从业者,当然不能因为技术的艰难就要求使用者的宽容,我们只能努力研发更好的产品,让VR设备有一天可以像智能手机一样走进每一个用户的生活0。
- 基于FPGA的VRLA蓄电池测试系统设计(06-08)
- 飞思卡尔防夹车窗升降参考设计(02-14)
- Atmel高效智能家用电器解决方案(02-12)
- 智能汽车演进从车窗升降参考设计开始(03-16)
- 浅谈VR输入技术 本土动捕解决方案有哪些?(05-15)
- 低余晖技术如何解决VR最大绊脚石晕动症?(06-04)