为什么总说VR定位动捕技术难 它究竟难在哪里?
现的变化,眼前所看到的画面也会跟随变化,且虚实情况也有区别;
另一方面,这些动作也必须会带来虚拟世界中的一些反馈,例如瞄准僵尸打出一颗子弹,则虚拟世界中的僵尸将受伤或者倒下。想要让使用者有真实的体验,那么追踪技术就必须可以已非常高的精度实现定位及动捕,否则就不能算是真正的虚拟现实了。

(2)精度问题
定位及动作捕捉精度,对于VR设备非常的重要。如果定位及动作捕捉精度不够高,会严重影响VR体验效果,也失去了虚拟现实的本质。影响精度问题的因素包括遮挡、干扰以及算法自身的限制等。
遮挡是各种定位及动捕系统最常见的工作失效原因之一。
例如光学定位系统中:当扫描光线被用户或物体遮挡时,空间点三维重构由于缺少必要的二维图像中的特征点间对应信息,容易导致定位跟踪失败。遮挡问题可以通过多视角光学系统来减轻,但这又造成了该系统又一大缺陷——价格过于昂贵。以Optitrack为例,Optitrack是国际上非常受认可的光学定位技术,如果有足够的摄像机,Optitrack定位及动捕技术可以很好地解决遮挡问题,具有非常高的精度。但是Optitrack摄像机的价格却让多添加几个摄像机变得不那么容易。
干扰包括外界电磁波干扰和自身设备间相互干扰。不管是光学定位还是激光定位,对外界的电磁波干扰都非常敏感,特别是当设备使用无线的方式通信时,如果存在同波段的电磁干扰,就会造成卡顿、失灵等现象,严重影响体验效果。

还有一个因素是算法本身的限制,例如惯性式动作捕捉技术。
惯性式动作捕捉系统采用MEMS三轴陀螺仪、三轴加速度计和三轴磁力计组成的惯性测量单元(IMU, Inertial Measurement Unit)来测量传感器的运动参数。而由IMU所测得的传感器运动参数有严重噪声干扰,MEMS 器件又存在明显的零偏和漂移, 使得惯性式动作捕捉系统无法长时间地对人体姿态进行精确的跟踪。
目前对于这个问题,G-Wearables的解决方案或许可以参考,其利用激光定位、反向动力学、惯性式动作捕捉相融合的算法来解决,从CES Asia展会上发布的STEPVR大盒子的体验来看,融合算法确实较好地解决了惯性式动捕的零偏和漂移问题,实现了1:1精准的动作还原。当然,这款产品的其他方面还需要消费者们自行去体验,与本文主题无关就不再赘述。
(3)快速运动时的定位及动捕问题
快速运动时的定位及动捕一直是VR行业一大难题,甚至现在很多公司都放弃了快速运动时的定位及动捕,通过VR内容控制用户不要有快速的动作来避免这一问题,但这终究无法从根源上解决问题。
那为什么说,快速运动时的定位及动捕难呢?
对于光学定位来说,难点在于运动模糊。
如果目标物体移动过于快速,则会出现运动模糊,即由于摄像设备和目标在曝光瞬间存在相对运动而形成的一种现象。这种现象很常见,我们平时用手机拍摄人物时,如果人物快速移动(例如奔跑、迅速起身等),则我们拍摄的图片即是模糊的,在VR的光学定位中是一样的。
光学定位系统利用多台摄像头拍摄目标物体,再利用所获得的图像信息及摄像头的位置信息来最终推算目标的空间位置,并基于这样的空间位置通过IK算法或者惯性传感器等来推算目标物体的动作。那么如果目标物体处于快速运动中,则摄像头拍摄的图像就存在模糊,信息不可用,也就无法实现精准的定位。因此基于光学定位的VR系统,在目标物体快速移动时会出现卡顿、跳点等现象。
对于激光定位技术来说,难点在于两束激光扫描存在时间间隔。
激光定位技术需要水平、垂直两个方向上的激光扇面对整个定位空间进行扫描,目标物体绑定的传感器必须接收到水平、垂直两个方向上的激光后方可进行定位,缺一不可。然而,这两个方向上的激光扇面是先后扫描,也就是存在时间差,如果目标物体迅速移动,则会出现水平和垂直两个方向上激光扫描到传感器时传感器所在的位置不一样,也就无法定位准确,进而影响动作捕捉。
(4)大范围应用问题
大范围应用问题一直困扰着VR行业,最重要的就是因为定位技术较难扩展。
对于主动式、被动式这样的光学定位技术,大范围应用最大的拦路虎是成本。
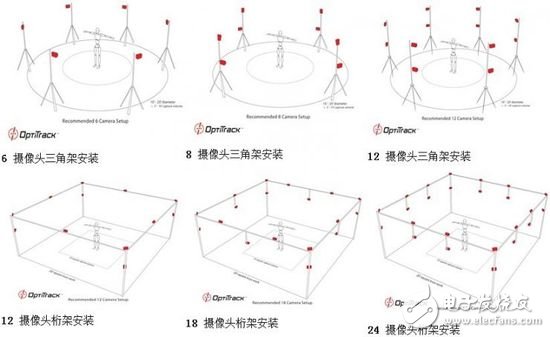
光学定位系统对摄像头要求非常高,造价也就非常昂贵,几万甚至上十万。而要采用多视角光学系统就需要很多这样的摄像头,如果在这样的成本基础上再做大范围应用,那么就需要更多的摄像头,如下图。这样就会导致成本翻几倍,整个定位系统的成本高得难以承受。
对于激光定位,大范围应用最大的难题是扩展。
由于激光的扫射面
- 基于FPGA的VRLA蓄电池测试系统设计(06-08)
- 飞思卡尔防夹车窗升降参考设计(02-14)
- Atmel高效智能家用电器解决方案(02-12)
- 智能汽车演进从车窗升降参考设计开始(03-16)
- 浅谈VR输入技术 本土动捕解决方案有哪些?(05-15)
- 低余晖技术如何解决VR最大绊脚石晕动症?(06-04)