为什么总说VR定位动捕技术难 它究竟难在哪里?
最近有文章解析了因为追星仪和陀螺仪的出错,加上科学家写反喷气代码导致了造成了价值19亿的一台名为"瞳"的X射线太空望远镜被玩坏了。实际上,追星仪和陀螺仪实现的类似于VR中的光学定位及姿态捕捉。一直以来,大家都在说VR定位动捕技术难,那到底难在哪里呢?作者系VR行业从业者,本文将会探讨下这个问题。
我相信,"瞳"真实的毁灭原因一定比文章中描述的要复杂很多,我写这篇文章也不是为了跟大家探讨"瞳",而是想跟大家聊一下由此事件引发的一些思考。
"瞳"和VR中的光学定位及姿态捕捉
瞳的追星仪,在文章中是这样描述的"追星仪是卫星上一个判断自己方位的仪器。..。..总的来说就是一个小相机,通过跟踪拍摄背景里一些亮的星星的位置。.. 用来判断自己所指向的方位。..。.."。

追星仪的定位技术大概是目标物体(即瞳本身)拍摄背景中的星星,根据得到的图像及所识别出的星星的位置来获取自身的方位信息。而瞳的陀螺仪则用来侦测瞳自身的空间姿态。所以,追星仪和陀螺仪实际上实现的类似于VR中的光学定位及姿态捕捉。
(1) 光学定位技术
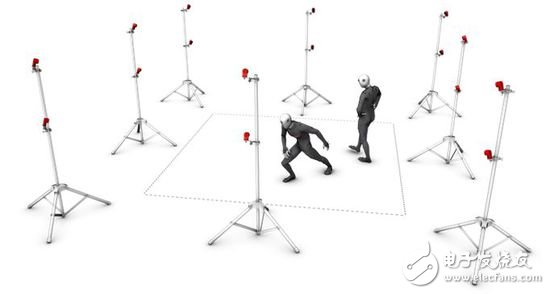
VR中的光学定位技术是利用摄像机拍摄目标物体,根据得到的目标图像及摄像机自身的位置信息推算出目标物体的位置及姿态等信息。根据标记点发光技术不同,光学定位技术还分为主动式和被动式两种。
具体实现流程:定位物体上布满标记点,标记点可以自主发射光信号或者反射定位系统发射来的点信号,使得摄像头拍摄的图像中标记点与周围环境可以明显区分。摄像机捕捉到目标物上标记点后,将多台摄像机从不同角度采集到的图像传输到计算机中,再通过视觉算法过滤掉无用的信息,从而获得标记点的位置。该定位法需要多个 CCD 对目标进行跟踪定位,需要至少两幅以上的具有相同标记点的图像进行亚像素提取、匹配操作计算出目标物的空间位置。实现流程图如下:

光学定位技术实现流程
目前,光学定位技术在国际上最受认可的是Optitrack。OptiTrack定位方案适用于游戏与动画制作,运动跟踪,力学分析,以及投影映射等多种应用方向,在VR行业有着非常大的影响力。
(2)惯性动作捕捉
陀螺仪的工作原理是通过测量三维坐标系内陀螺转子的垂直轴与固定方向之间的夹角,并计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态。
它的强项在于测量设备自身的旋转运动。陀螺仪用于姿态捕捉,集成了加速度计和磁力计后,共同应用在惯性动作捕捉系统。
惯性动作捕捉系统需要在运动物体的重要节点佩戴集成加速度计,陀螺仪和磁力计等惯性传感器设备,传感器设备捕捉目标物体的运动数据,包括身体部位的姿态、方位等信息,再将这些数据通过数据传输设备传输到数据处理设备中,经过数据修正、处理后,最终建立起三维模型,并使得三维模型随着运动物体真正、自然地运动起来。

VR定位动捕技术到底难在哪里?
前文提到,"瞳"最终没有避免毁灭的命运,当然我们得说这次毁灭有一些人为的可避免的错误造成,但无法否认的事实是它耗费了人类价值19亿的资源。这也从侧面证实了定位及动捕技术难度之高。
当然,应用于VR行业中时,对于精度等的要求不会有"瞳"那么高,但为了能给使用者带来超强沉浸感体验,定位及动捕的精度、延迟、刷新率等也一定要达到非常高的水平。很多人知道2016年被称为VR的元年,但是又有多少人知道VR自1963年被提出至今耗费了多少科学家、工程师的心血?
读者可能会有疑问,大家一直在说VR定位动捕技术难,那到底难在哪里呢?接下来笔者就来谈谈VR定位动捕技术的难点。
(1)人体运动复杂性
由于在现实世界里面,"场景"是相对静止的,我们之所以看到眼前的东西在动,是因为我们头部、眼部、身体等在移动,使得眼前的"场景"形成了一个动画。而虚拟现实就是要模拟出现实世界的这种"动画",也就是说在虚拟现实的设备中,画面要根据人的这些动作做出相应的调整才可以,而这些动作看似使用定位、陀螺仪等设备就可以解决,但其实则不然。人体的动作可以看作是复杂且有一定规律的一系列动作组合而成,为了完成一个动作,每一个完整的动都可以分解为各个肢体的动作,各个肢体之间的动作既相互独立又相互限制。人体的各种动作是有多个自由度组成,其复杂性使得计算机追踪时存在着很多的困难和挑战。
这里给大家举个例子:
在一些大家很喜欢的搏斗或者射击游戏中,我们经常需要作出身体快速移动,头部快速转动,以及高速的转身、下蹲等动作,一方面这些动作会带来我们实
- 基于FPGA的VRLA蓄电池测试系统设计(06-08)
- 飞思卡尔防夹车窗升降参考设计(02-14)
- Atmel高效智能家用电器解决方案(02-12)
- 智能汽车演进从车窗升降参考设计开始(03-16)
- 浅谈VR输入技术 本土动捕解决方案有哪些?(05-15)
- 低余晖技术如何解决VR最大绊脚石晕动症?(06-04)