工业控制之伺服系统精选开发资料
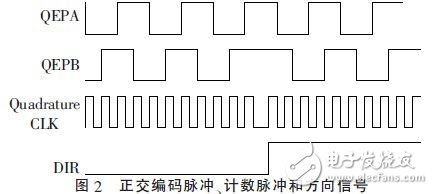
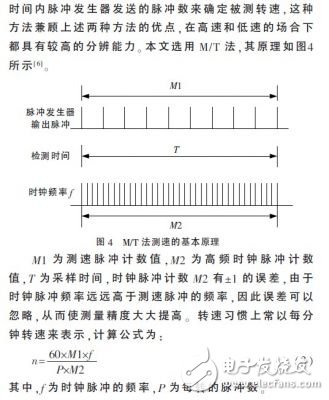
控制。此外,还可以通过 QCAP模块来计算电机的速度信息[3]。正交编码脉冲、定时器计数脉冲和计数方向时序逻辑如图2所示。
2.2 光电编码器和TMS320F28335($18.5250)的接口电路
伺服系统的编码器信号是从伺服驱动器上输出的差分信号,而DSP需要的是TTL信号,因此在采集前需要对编码器输出的信号OA+、OA-、OB+、 OB-、OZ+和OZ-进行转换,本系统利用AM26LS32($0.3125)芯片进行差分信号的接收[4],接收后的输出信号为A、B和Z 3路信号,其中A、B信号相位差为90°。光电编码器输出的信号经过光电隔离、整形之后送到DSP eQEP模块的相应引脚,其接口电路如图3所示。其中,6N137($0.2160)是高速光耦芯片,实现数字信号和模拟信号的隔离;74HC14($0.0625)是高速CMOS反相器,实现对输入脉冲信号的整形。图3只给出了光电编码器输出的OA+、OA-两路信号的光电隔离和整形,光电隔离和整形后的信号送到TMS320F28335($18.5250)外设引脚的EQEP1A、EQEP1B和EQEP1I,进行正交解码。
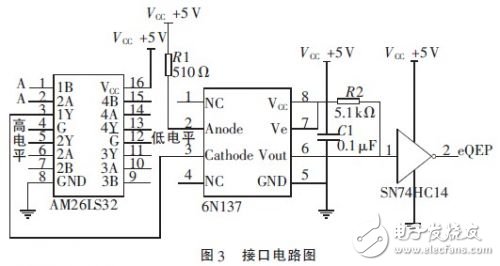
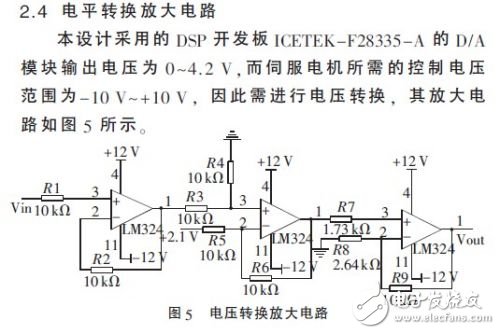
由于DSP开发板输出阻抗较大,有分压导致衰减损耗严重,因此放大电路前需加一个电压跟随器,起到阻抗匹配作用,从而使后级放大电路能够更好地工作。
3 伺服系统的软件设计
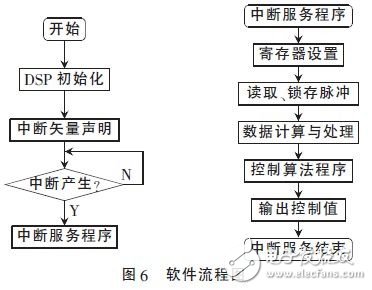
系统的软件调试与开发均采用针对TMS320F28335($18.5250)的CCSV3.3版本。TI公司为用户提供的软件开发工具CCS(Code Composer Studio)提供了可视化窗口,将所有代码生成工具集成在一起,用户的一切开发过程都在CCS中进行,包括项目建立、源程序的编辑、程序的编译和调试,此外,CCS还提供了实时操作系统DSP/BIOS,极大地方便了调试和开发。本系统的DSP程序主要分为主程序和中断服务程序两个模块。主程序模块 [10]主要实现各个功能模块的初始化、内存变量的定义和中断矢量的声明等工作。中断程序模块主要实现相关寄存器的设置、读取和锁存eQEP模块的脉冲计数、检测电路的反馈以及控制算法的程序等工作,其软件流程如图6所示。
本文提出了稳定平台伺服系统的设计,利用DSP芯片TMS320F28335($18.5250)的eQEP模块对光电编码器的脉冲信号进行解码和计数,求得伺服电机的角度和速度信息,从而与上位机给定值进行比较,通过调节算法使D/A模块产生电压信号对伺服电机进行速度控制。研究表明,该设计具有较高的响应速度、稳定精度和较强的抗负载扰动能力,充分实现了稳定平台的高精度控制。同时,该系统具有较强的鲁棒性和自适应能力,验证了该方案的有效性,并为不同控制领域提供了高性能的数字解决方案。
一套高精度的交流伺服定剪系统的设计方案
在卷筒流水线的板带生产企业中,如扎钢、铝铂、卷筒纸等,其裁切系统,许多企业基本上还在沿用以前的直流或交流变频组成的闭环控制系统,其裁切精度虽能达到基本的要求,但往往不是很高,随着社会的发展,生产企业精益求精,对提高自身的品牌形象也日显重要。鉴于此,本文介绍了一款高精度的交流伺服定剪系统的设计方案。经验证,本方案所设计的这套系统,稳定性和精度都较以往有了大大的提高,在减少了损失的同时还满足了客户对产品越来越高的要求。
1系统设计原理

图1:康尔达公司的交流伺服定剪系统
假设要裁切的长度为S,主动辊的周长为L,主辊转过的圈数N(或者说角度),则S=LN,这是一个线性方程,也即S和N成正比,假设减带机齿轮的变比为 K,则可求出S和电机转过圈数X,S=L*X/K.此式说明S和X仍为一个线性方程,为此要取得需要的长度S,只需控制住电机转过的圈数。在原系统中采用变频器、PLC、编码器和高速计数模块来组成控制系统,其中PLC给定值(长度对应的脉冲量)送入变频器驱动电机运转,电机运转又带动编码器旋转产生脉冲,反馈回高速计数器送入PLC和原给定值比较,直到相等时停止电机的运行。实际使用中此系统虽然通过调整变频器的方式,引入第一、二加减速时间来减少电机的惯性,使电机在极慢速成爬行时停车。但此系统的精度仍不可能很高。其缺点:
(1)编码器和电机不同轴、不是一体;
(2)电机停车要用抱闸来刹车,而抱闸的快慢和力量对精度都将产生影响。而利用交流伺服系统后这两方面
2系统硬件设计
■操作台-由主令电器控制定尺系统的自动和手动,由8421编码的拨码开关提供所需要的裁切尺寸。
■PLC-采用FX1N-40MT,该PLC具有成本较低,且带有所需要的高速脉冲输出,一个PLC单元能同时输出2点100KHz脉冲,该PLC配备有 7条特殊指令,包括零返回、绝对位置读出、绝对或相对驱动以及特殊脉冲输出
- 通用型工业电源可采用高电压输入,并产生从8个1A到2个4A的输出(09-11)
- 时光伺服系统在高位出钢机项目中的应用(02-20)
- 三菱电机伺服系统过载报警消除的方法(07-02)
- 伺服系统的特点、分类及发展方向(03-09)
- 伺服系统的控制模式有哪几种?(09-25)
- 伺服系统的线性补偿与伺服系统的测速测角(05-12)