工业控制之伺服系统精选开发资料
C10包含4个PACblock模块,每个模块都有2组差动输入、1路差动输出。
将这4部分适当地连接,便可形成较复杂的模拟电路。
3.2 ispPAC10实现调节器电路
以图(3)所示具体电路为例,设R0=10 kΩ,C0=0.15μF,Rf=40 kΩ,Cf=0.5μF,其传递函数如图7所示。
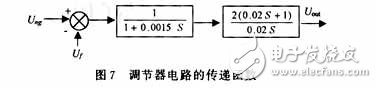
为了用ispPAC10实现上述结构,需将其变成图8所示的形式。
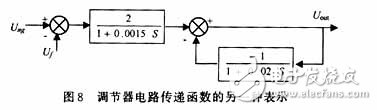
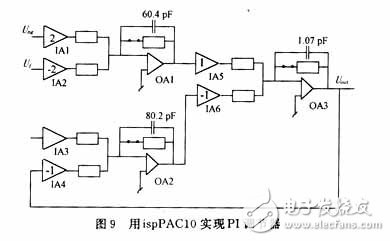
现在可以用ispPAC10直接实现上述调节器,具体电路如图9所示,其中运放的增益、电容的取值是通过软件PAC-Designer设定的。
4 结 语
用可编程模拟器件可以很方便地设计、实现模拟电路。用他设计模拟调速电路,电路的参数、结构都可以通过软件进行调整,使调试过程变得非常简单。需要注意的是这一类器件工作电压一般不超过5 V,ispPAC10工作电压为+5 V,因此输入信号不能太大,目前还只能用于小信号模拟电路中,尽管如此,其发展前景仍然非常诱人。
基于DSP的无刷直流电机伺服系统设计
引言
无刷直流电机(简称BLDCM)是一种用电子换向器取代机械电刷和机械换向器的新型直流电动机,具有结构简单,调速性好,效率高等优点,目前已经得到广泛应用。TMS320F2812($18.5250)数字信号处理器是TI公司最新推出的32位定点DSP控制器,器件上集成了多种先进的外设,具有灵活可靠的控制和通信模块,完全可以实现电机系统的控制和通信功能,为电机伺服系统的实现提供了良好的平台。本文设计了以高性能TMS-320F2812DSP 芯片为核心的无刷直流电机伺服控制系统。
1 伺服控制系统硬件构成及其工作原理
系统硬件框图如图1所示。
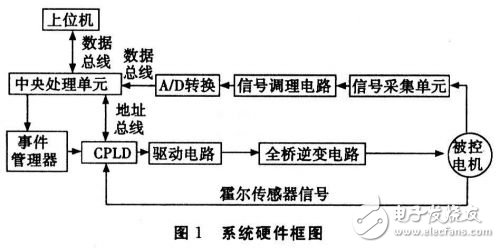
1.1 控制电路
控制电路是以F2812为核心,另外还包括位置编码、数据采集、数据通信等功能模块和部分外围电路及数据接口,其主要功能是实现对被控对象位置信息的采集和处理,速度反馈信息的接收和处理,位置、速度的闭环控制。F2812片内具有12位的AD转换器,但为提高伺服系统运动的精度,在DSP外围扩展了两片 6路16位的AD转换芯片,用来采集反馈信号以及输入的运动指令信号。
系统设计同时采用DSP和CPLD以提高电路的可行性。DSP所起到的作用主要是根据反馈的位置,速度信号,结合电机的运动方向和运动速度,利用 F2812片上的电机控制专用外设EVA,通过数字I/O口输出1路与电机运动相对应的PWM波。CPLD根据输入的PWM信号,控制信号和数字信号组成的换相时序信息输出对应大小和对应时序的相电压,从而驱动电机做相应的运动。
1.2 信号采集以及调理电路
该电路对各种传感器信号及电流电压信号进行采集并处理。包括采样的电流电压反馈信号,给定的控制信号等模拟量信号,以及霍尔传感器的输出等开关量信号,经调理电路处理后,使其幅值及电平可以满足DSP控制器的要求。
本系统使用AD7656($15.3360)对采集来的模拟信号进行模数转换。F2812的GPIOA0口与74ACl6373的使能端相连,用于使能锁存器,GPIOAl与 CONVSTX相连,用来启动6路A/D的同时转换。GPIOA2连接BUSY信号,AD7656($15.3360)转换结束后,BUSY信号变低,DSP以查询方式接收 AD数据。74ACl6373用于锁存AD转换后的16位数据,74LSl38用于将DSP地址线译码与AD7656($15.3360)的片选信号相连。
1.3 驱动电路
电机的驱动电路由驱动芯片IR2130($5.6212)和三相全逆变电路构成。功率驱动电路采用+15 V供电,驱动芯片IR2130($5.6212)内置了2.5 μs的死区时间,防止统一桥臂的上下两个MOSFET同时导通。当系统出现欠压,过流时,IR2130($5.6212)启动内置的保护电路锁住后面的PWM输出,保护系统电路。IR2-130的输入信号是由CPLD解算而得的6路PWM波,经过光耦隔离后送入IR2130($5.6212),输出信号送MOSFET驱动无刷直流电机。在三相逆变电路中,六个功率器件起绕组开关作用,采用两两通电,三相六状态方式,每一个瞬间有两个功率管导通,每隔1/6周期(60°电角度)换相一次,每次换相一个功率管,每个功率管一次导通120°电角度。
2 伺服系统的控制策略
本系统是通过电流、速度、位置三闭环结构实现系统控制的,其中电流环和速度环是内环,位置环是外环。
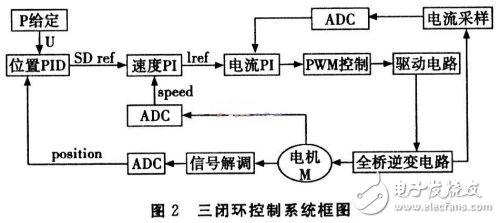
图2是无刷直流电机控制系统框图,在系统中设置了速度PI调节器和电流PI调节器,分别调节电机的转速和电流,两者之间是串级连接。给定的位置信号U与反馈的位置信号position经过位置PID调节后得到速度的参考值SDref。根据两次捕获的时间可以计算出电机运行的速度speed,此速度作为速度参考值的反馈量,经过速度PI调节后可以得到参考电流Iref,通过电流检
- 通用型工业电源可采用高电压输入,并产生从8个1A到2个4A的输出(09-11)
- 时光伺服系统在高位出钢机项目中的应用(02-20)
- 三菱电机伺服系统过载报警消除的方法(07-02)
- 伺服系统的特点、分类及发展方向(03-09)
- 伺服系统的控制模式有哪几种?(09-25)
- 伺服系统的线性补偿与伺服系统的测速测角(05-12)