3种完整的智能机器人解决方案,任你选!
近年来工业机器人供应量在大多数行业都呈现出上涨的态势。而服务机器人发展历史较短。其在功能上的主要不同体现在两个方面:一是与人的沟通协作;二是在复杂环境下代替人的部分工作。
机器人(robot)一词,最早出现在1920年捷克科幻作家恰配克的《罗索姆的万能机器人》中,原文作"Robota",后来成为英文中通行的 "Robot"。更科学的定义是1967年由日本科学家森政弘与合田周平提出的:"机器人是一种具有移动性、个体性、智能性、通用性、半机械半人性、自动 性、奴隶性等7个特征的柔性机器。"
国际机器人联合会将机器人分为两类,工业机器人和服务机器人。工业机器人是"一种应用于工业自动化的, 含有三个及以上的可编程轴的、自动控制的、可编程的、多功能执行机构,它可以是固定式的或移动式的"。服务机器人则是"一种半自主或全自主工作的机器人, 它能完成有益于人类健康的服务工作,但不包括从事生产的设备"。从定义可见,分类的标准是机器人的应用场合。
一般的机器人都由机械结构、控制驱动系统、感知系统、交互系统等部分组成。
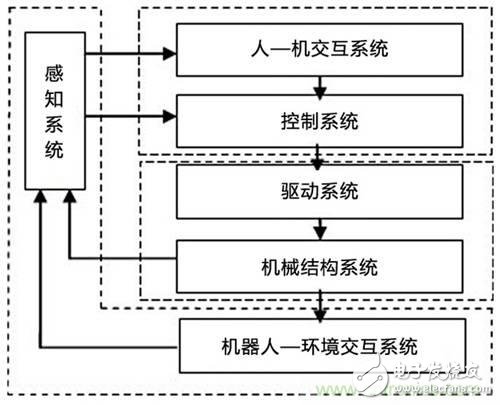
图1 一般机器人的系统构成
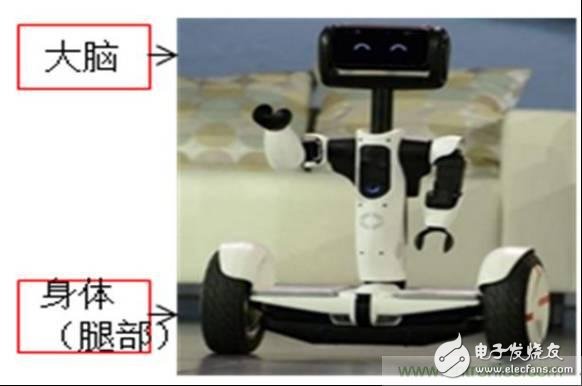
未来产业与服务应用相结合的世界机器人市场必将成为一种趋势,为了迎合市场的需求,很多机器人解决方案顺势而出,比如机器人大脑采用Rockchip RK3288 为主平台的,4核 Cortex-A17 处理器,主频1.8GHz,内嵌最新一代GPU(Mali-T764)能顺利支持高分辨率(3840X2160)显示。机器人机身的部分采用NXP LPC54102 作为控制部分,驱动部分采用的是Toshiba TMPM375FSDMG 芯片,实现 FOC 适量控制。
一、基于 Rockchip RK3288 的新一代机器人大脑解决方案
1、功能框图
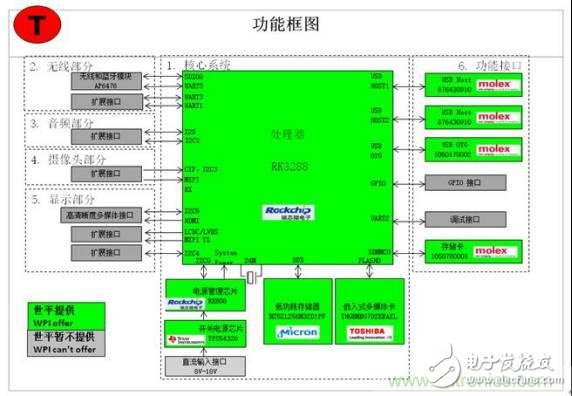
2、功能描述
① RK3288 最小系统
② 支持 WIFI & BT 功能
③ 集成 HDMI、USB、SD 卡、外部扩展口
3、重要特征
① 4 核 Cortex-A17 处理器,主频 1.8GHz,内嵌最新一代 GPU(Mali-T764)能顺利支持高分辨率(3840X2160)显示
② 符合 96Boards 接口定义
二、基于 NXP LPC54102和 Toshiba TMPM375FSDMG的轮式机器人方案
1、功能框图
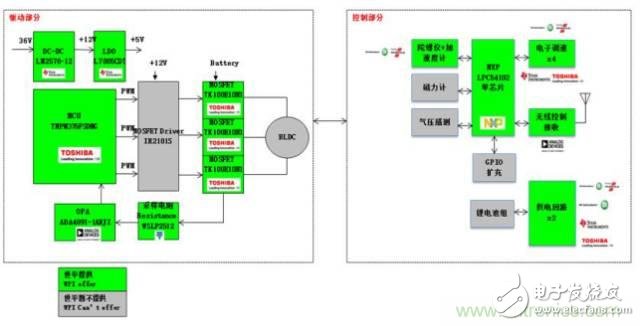
2、功能描述
① 可实现通过遥控器控制偏航角的方式控制机器人的运动方向
② 可控制机器人的速度和运动距离
3、重要特征
① 采用九轴传感器,通过姿态算法来完成机器人的运动控制
② 机器人驱动板采用的是Toshiba TMPM375FSDMG,实现 FOC 适量控制
三、基于NXP低功耗蓝牙控制的机器人设计方案
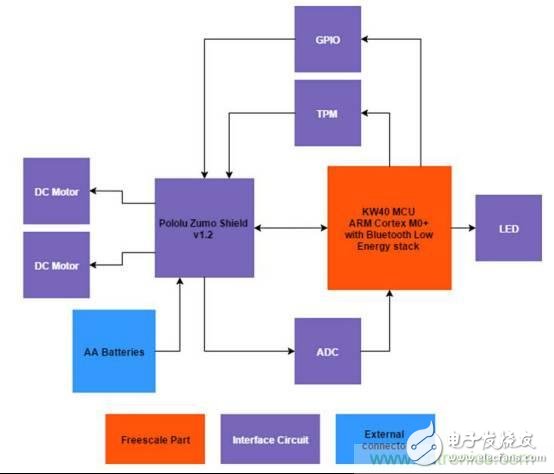
Bluetooth® Low Energy (BLE)控制的机器人参考设计采用FRDM-KW40板和Pololu Zumo机器人开发,并且可以通过手机APP控制。BLE控制的机器人基于KineTIs KW40Z片上系统(SOC),该系统包括一个ARM® Cortex® M0+处理器,并配有面向BLE和802.15.4的2.4 GHz无线电。它采用HID over GATT配置文件实施,用作人机接口设备。该软件提供的特性包括:BLE数据到手机app的传输、电机控制和电池监测,等等。
1、低功耗蓝牙控制的机器人系统框图
2、低功耗蓝牙控制的机器人参考设计特性
其中包括恩智浦超低功耗的KineTIs KW40Z SoC,它为便携式、超低功耗的嵌入式系统提供Bluetooth® Smart/Bluetooth® Low Energy (BLE) v4.1和/或IEEE® 802.15.4-2011射频连接
使用KineTIs软件开发工具包(SDK)开发,面向KineTIs MCU提供全面的软件支持,包括一个硬件抽象层(HAL)、每个MCU外设的驱动、连接堆栈、中间件、实时操作系统以及应用示例,旨在简化和加快基于Kinetis微控制器的应用开发。
3、支持器件
KW40Z: Kinetis® KW40Z-2.4 GHz双模式:BLE和802.15.4无线连接微控制器(MCU),基于ARM® Cortex®-M0+内核
KW40Z是一款高集成度的单芯片器件,让便携式、超低功耗的嵌入式系统具备Bluetooth® Smart/Bluetooth® Low Energy (BLE) v4.1和IEEE® 802.15.4-2011射频连接。应用包括便携式医疗设备、可穿戴的运动和健身设备、AV遥控器、电脑键盘和鼠标、游戏控制器、门禁、安防系统、智能 能源和家庭网络。
KW40Z MCU集成了一个2.4 GHz收发器
机器人 相关文章:
- 先进手术系统所需的独特电源需求,凌力尔特来接招(10-11)
- 3G/WIFI控制太阳能驱动机器人制作详解(10-28)
- 超声波移动机器人导航设计方法(04-11)
- ROCKWELL系统在机器人汽车焊装线上的应用(07-07)
- 智能机器人在家庭医疗保健的设计和应用(09-19)
- 基于DSP和机器人的声控系统设计与实现(02-21)