手势识别技术原理及解决方案
手势识别对于我们来说并不陌生,手势识别技术很早就有,目前也在逐渐成熟,现在大部分消费类应用都在试图增加这一识别功能,无论是智能家居,智能可穿戴以及VR 等应用领域,增加了手势识别控制功能,必能成为该应用产品的一大卖点。手势识别可以带来很多的好处,功能炫酷,操作方便,在很多应用场合都起到了良好的助力功能。
手势识别技术的发展
说起手势识别技术的发展,可以粗略分为两个阶段:二维手势识别以及三维手势识别。
早期的手势识别识别是基于二维彩色图像的识别技术,所谓的二维彩色图像是指通过普通摄像头拍出场景后,得到二维的静态图像,然后再通过计算机图形算法进行图像中内容的识别。二维的手型识别的只能识别出几个静态的手势动作,而且这些动作必须要提前进行预设好。
相比较二维手势识别,三维手势识别增加了一个Z轴的信息,它可以识别各种手型、手势和动作。三维手势识别也是现在手势识别发展的主要方向。不过这种包含一定深度信息的手势识别,需要特别的硬件来实现。常见的有通过传感器和光学摄像头来完成。
手势识别的关键技术
手势识别中最关键的包括对手势动作的跟踪以及后续的计算机数据处理。关于手势动作捕捉主要是通过光学和传感器两种方式来实现。手势识别推测的算法,包括模板匹配技术(二维手势识别技术使用的)、通过统计样本特征以及深度学习神经网络技术。

根据硬件实现方式的不同,目前行业内所采用的手势识别大约有三种:
1、结构光(Structure Light),通过激光的折射以及算法计算出物体的位置和深度信息,进而复原整个三维空间。结构光的代表产品有微软的Kinect一代。不过由于以来折射光的落点位移来计算位置,这种技术不能计算出精确的深度信息,对识别的距离也有严格的要求。
2、光飞时间(TIme of Flight),加载一个发光元件,通过CMOS传感器来捕捉计算光子的飞行时间,根据光子飞行时间推算出光子飞行的距离,也就得到了物体的深度信息。代表作品为Intel带手势识别功能的三维摄像头。
3、多角成像(MulTI-camera),现在手势识别领域的佼佼者Leap MoTIon使用的就是这种技术。它使用两个或者两个以上的摄像头同时采集图像,通过比对这些不同摄像头在同一时刻获得的图像的差别,使用算法来计算深度信息,从而多角三维成像。
简单介绍两个手势识别解决方案:
1、基于NXP LPC824 和 Vishay VCNL4020 的手势识别方案
推出基于NXP LPC824 和 Vishay VCNL4020 的手势识别方案,可以判断手势运动的方向。
功能框图
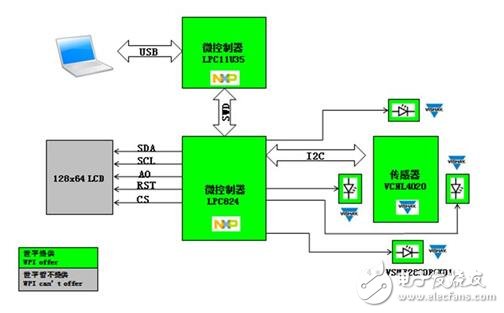
功能描述
① 手势识别,LCD 显示手势运动方向
② 兼容 arduino 接口
③ VCNL4020 感应光线强度变化
④ 集成调试器,无需第三方调试器
重要特征
① VSMF2890RGX01 发射红外光
② LPC824M201JHI33 运行手势识别算法
③ LPC11U35FHI33 为调试器
2、基于PAJ7620U2智能隔空手势解决方案
原相科技(Pixart)为CMOS光感应用集成电路领导厂商,产品特点为低功耗、准确性、小尺寸及低成本。
功能框图
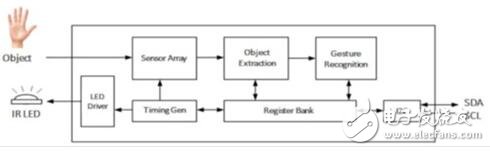
PAJ7620U2是一种光学数组式传感器,以使复杂的手势和光标模式输出。
主要特征
•内置光源和环境光抑制滤波器 集成的LED,镜头和手势传感器在一个小的立方体模块。能在黑暗或低光环境下工作,减少环境光干扰。
•内置手势识别支持9个手势类型和输出的手势中断和结果,大大节省了系统的电源。
•支持率为240Hz的报告可程序设计手势中断唤醒系统。
产品应用
后视镜、车载中控、HUD、智能眼镜、机器人、VR、幼教类产品。。等等。
- 黑莓新专利:无需接触屏幕即可手势操作(02-20)
- 主流手势识别技术解析 有助提升VR/AR设备体验(02-12)
- 如何用Opencv实现静态手势识别玩石头剪刀布?(02-10)
- 技术牛深入剖析手势识别技术(02-02)
- 欧姆龙开发出可识别手部动作的“手势识别技术”(04-30)
- 14位模数ADC+20位突发累加器的ADI手势识别传感器方案(09-18)