汽车应用标准之争 凸显LIN竞争优势
7. 整体实现 – LIN比CAN的实现成本和复杂性更低。对于CAN,其每个节点都需要CAN接口、晶体和双线连接。而LIN通过简单的串行通信模块(SCB)和增强型ISO 9141接口便可工作,无需晶体,而且是采用单线连接。
表1提供LIN与CAN特性的快速对比,以帮助开发人员根据不同参数需求选择网络:
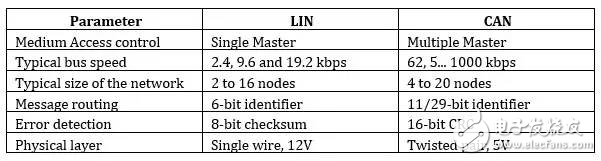
表1:LIN与CAN对比
基于LIN的系统的组件:
创建基于LIN的系统的复杂性远远低于基于CAN的系统。基于LIN的系统所需组件包括:
- 物理收发器(PHY)
- 带有串行通信模块(SCB)/接口的微控制器
- 开发工具:软件
典型LIN网络类似于图2所示带有一个主节点和多个从节点的系统。
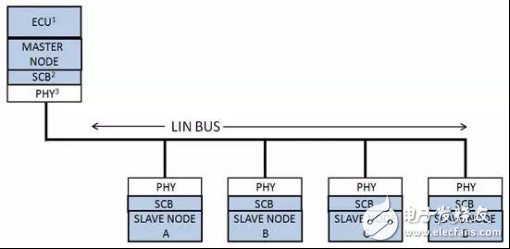
图2:典型LIN网络
物理收发器注释:大多数LIN实现方案采用收发器管理接口连接和支持更高的电压电平。这些收发器一般位于微控制器外部。
为了在LIN网络中担当从节点,MCU需要一个串行通信接口(SCI)或串行通信模块(SCB),以支持UART,从而实现接口连接。LIN协议采用UART作为基本收发方式。如果无法在MCU硬件中实现UART,则可以采用软件实现。但是不建议采用这种方法,因为会给处理器带来不必要的负载。为用作主节点,我们需要采用更高端的MCU。除了支持SCI的UART之外,主节点还需要一个时钟发生器。
LIN采用符合ISO9141标准的BUS单线连接。如今我们具有更高级的汽车级MCU,其以内置LIN-PHY提供对LIN的专用支持。这种集成可以使实现方案更紧凑、更简单。
大多数MCU供应商至少会在其一个器件系列中支持LIN接口。例如赛普拉斯半导体公司的可编程片上系统(PSoC),其提供一个在单芯片上集成可编程逻辑、存储器和MCU的片上系统架构。这些器件支持能够配置为LIN的串行通信接口,从而很有可能适用于需要LIN的汽车应用。
除了MCU和LIN PHY之外,配置LIN接口的不同参数通常需要软件模块等开发工具。赛普拉斯等处理器厂商可提供支持软硬件同步设计的设计环境,如:PSoC Designer 与PSoC Creator。此类工具提供灵活的LIN组件或用户模块,其可以根据设计需求进行编程并运行。
MCU供应商还需要通过符合LIN规范的一致性测试对其LIN接口进行验证或认证。几乎所有OEM厂商都会提出此项要求,而MCU供应商在其开发过程中遵守相关要求。
LIN消息帧:
为了更好地了解数据如何通过LIN传输,需要了解相关消息帧。LIN消息帧由一个报头和一个响应组成。报头长度固定,而响应包含0~8字节的数据。帧间响应时间是从节点响应LIN主节点发出的请求所需要的时间。帧间响应时间随网络节点不同而不同,因为其取决于各节点的软硬件实现。响应之后是一个针对消息帧的数据部分而计算的校验和。
报头分为三个字段:
1. 同步间隔场(SYNC-break field)用于 激活所有连接的LIN从节点,使其侦听报头的随后部分。它由一个起始位和多个显性位(dominant bit)组成。
2. 同步场(SYNC-field)是一个标准的数据格式字节。运行于RC振荡器上的LIN从节点采用固定量的上升沿和下降沿之间的距离测量总线的当前位时间,以便重新计算内部波特率。
3. 标识符(ID)场由主节点发送到所有LIN节点,其通常包含64个不同值之一,并且在8位数据中含有2个奇偶校验位。标识符包含随后通过LIN总线传输的信息,如:发送者、接受者、用途以及数据字段长度。
消息帧结构如图3所示。。

图3:LIN消息帧结构
LIN应用:
我们已经清楚哪类汽车应用需要LIN。我们来快速查看一下采用LIN网络的典型应用列表(见表2)。为了更好地了解其差异,表2将需要LIN的应用与需要CAN的应用进行了对比。

表2:典型LIN应用
车载电子数量在不断增多,其网络复杂性也在不断提高。我们在不远的将来会在路上看到能够相互通信的无人驾驶汽车。随着汽车电气网络数量增多和复杂性提高,更简单、更便宜的替代产品也在不断增加,其中最流行的是LIN。LIN已经成为大多数不需要CAN等级安全性的车身控制应用的标准,而且在将来还会保持其流行势头。随着新版本的发布(最新版本为2.2A版),LIN也在保持其更新,以满足汽车新标准要求。这同时也要求汽车MCU供应商装备最新、最优LIN接口版本,以便在车身控制应用领域发挥其用武之地。
- 汽车无人驾驶传感器平台大盘点(02-02)
- 自动驾驶距离我们还有多遥远?(02-16)
- 机器人时代:无人驾驶的野心(02-16)
- 多功能导盲车系统设计与实现(02-02)
- 智能汽车电子控制单元该如何简化(02-19)
- 无人驾驶项目展示以及四个技术趋势(02-21)