无人驾驶项目展示以及四个技术趋势
WEpod在荷兰Wageningen镇的项目DEVI的项目在国内媒体已经报道,这部分我也在这个周准备分几个部分来探讨未来的路径。在国内路线开展无人驾驶区域试验场和道路试验区的情况下,有很多的路径是可以进行对照的。
首先谈路径的问题,我们可以做一下两种区隔:
1)车队演进道路
通过配置特定的道路设施或者道路辅助的系统,来帮助车辆完成自动驾驶。这里可以单独开一条路,类似专用高速道路;也可以使用公共专门的车道,类似没有车轨的电车的概念。
2)车辆独立系统
这里从无人驾驶系统独立性可以分为:
后装高级自动驾驶套装(Cruise Automation),能够提供自动驾驶功能,能够通过总线控制油门、转向与刹车,车企高级自动驾驶套装(ZAFS),由原OEM提供的自动驾驶系统。
简单来说,这两者区别应用范围是否有限定性,是否是在限定的路线还有在一定已经经过学习适应的环境。
从3D地图的情况下,两者所处的环境还是差距很大的。其实从另一个侧面也反映出,限定一定的场景,可以减小实际的感知的难度和计算的量。
1)由高尔夫车演进的摆渡车
下面重点来说说这个EZ10,这个车是法国Ligier做的。
动力系统包括:48V 8 Kwh LiFePO4 电池、4 Kw交流感应电机
感知系统包括:基本配置包括GPS、4×lidar、两个Camera
在Devi项目里增加了camera & radar& 使用地区的地图
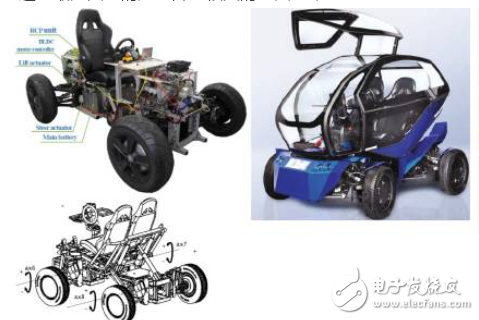
2)由单人/双人演进的未来小车

如果我们把德国的那个小车算上,其实这类系统低速的都可以用48V的系统来做,然后将感知系统+动力系统组合。这里最为典型的是前阵子很火的德国小车EO2 Smart Connecting Ca
与之相类似的设计,如PICAV和英国的LUTZ的小车(配置了3个lidar、2个radar还有4个超声传感器和一个雷达),此类小车平摊下来的硬件成本似乎太高了一些。
所以我倒是觉得可以做如下的判断,未来无人驾驶车辆会形成:
1 场景分离,个人开的车辆、摆渡的车辆,在低速下,解决城市、旅游区的问题会比较实用。为了最大化使用效率,会根据不同时段进行智能调整接人和目的地。
2 如上面所看到的那样,无人驾驶车辆技术比较好的办法,是将高端的感知和计算技术,先应用在比较简单的低速动力系统里面
3 不管是小车还是大车,由于用户不需要再看外面专心注意外部的情况,所有的信息、娱乐服务可以按照即插即入的方式进行渗透
4 短期内,在固定路段,不仅是地图、通信(与后台控制、基础设施通信)都是非常有必要的。
小结:
1)如果面对一个事情太复杂,我们必须选择在某些方面将之简化,进行差异化的方案演进
2)可以预见到,未来在不同的地点,需要各种辅助来把无人驾驶一点点完善起来
- 汽车无人驾驶传感器平台大盘点(02-02)
- 自动驾驶距离我们还有多遥远?(02-16)
- 机器人时代:无人驾驶的野心(02-16)
- 多功能导盲车系统设计与实现(02-02)
- 智能汽车电子控制单元该如何简化(02-19)
- 汽车应用标准之争 凸显LIN竞争优势(02-24)