高级驾驶员辅助系统(ADAS)关键技术应用与方案集锦
的支持。这将能明显减少交通事故的数目,这正是象美国高速公路安全协会(NHTSA)和欧盟这样的美国和国际协会所希看看到的。
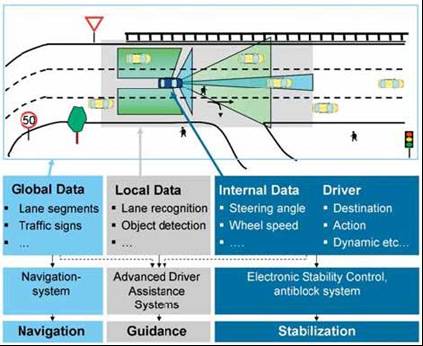
图2 数据支持和信息辅助系统
pro.pilot网络
为了从高级驾驶辅助系统中获得最大的利益,并且实现"零事故"的目标,西门子VDO汽车公司开发的pro.pilot是以司机为中心的。除了增加安全性 和舒适性以外,pro.pilot还能为司机提供更多的方向选择和目前整体的交通状况,使司机选择更经济的驾驶方案。这样,pro.pilot能够在紧急 情况下帮助司机,但确又不会减少驾驶乐趣。但是司机仍然要对汽车负所有的责任。环境感应和传感器技术的性能只是高级辅助驾驶系统成功的一方面。除了象传感 器和制动器这样的电子机械部件,pro.pilot还包括车辆一体化、应用程序和驱动接口,如图3所示。

图3 pro.pilot的组成
车辆一体化包括机械和电子两方面因素,比如像传感器和制动器需要集成到汽车的结构和电子体系中往。由于传感器一般被安装在车辆表面四周,所以在设计和封 装上有很多限制。驱动反馈显示屏的设计和安装位置受到整个汽车内饰设计的影响。增加元件和控制器会影响汽车整体的电子体系,比如ECU的数目、内部的连 接、总线的带宽、延迟时间等。
应用程序包括运算法则和软件,可以处理和分析传感器获得的数据,以获得汽车四周环境的示意图并对交通状况 进行分类。通过对目标物体的探测,司机可以及时地获得通知或警示,终极对汽车的动力性进行干预。人机界面(HMI)可以包括视觉、听觉或者触觉反馈。司机 与系统之间的交流会影响整个系统的性能,包括对司机和车辆的影响,因此决定了高级辅助驾驶系统能否减少事故的发生。
考虑到上述所有的因素,才有可能具体说明辅助驾驶系统的概念,并采用恰当的方案和元件来实现完美的高性能系统。
ADAS的传感器
高级辅助驾驶系统基于不同的传感器技术,如图4所示。77GHz的雷达传感器目前已经在高端奢华轿车上的主动式巡航控制系统(ACC)上应用多年了。该 系统的传感器可以丈量前方车辆的速度以及两车之间的间隔,同时可以监测自身车辆的速度和间隔。目前已经在中级轿车和经济型轿车市场上开始应用的机载激光雷 达(Lidar)传感器是远程传感器中比较经济的选择。相比于雷达,这种传感器发射激光脉冲,并能检测从其他物体反射回来的光线。与其他物体之间的间隔可 以通过信号延迟的时间来进行计算。

图4 重要的传感器
短程雷达传感器的工作频率是24GHz,用于监测车辆四周的物体。这种传感器一般安装在车辆的侧面,其信息用于盲点检测(BSD)和并线辅助(LCA) 功能,比如在盲点中出现物体或者邻近车道车辆进进盲点时,会向司机提出预警。下一步,其信息能够与导航系统相结合,更好地实现车辆引导。安装在车辆前方或 后方的24GHz雷达传感器可以用于预防碰撞发生。
视频传感器能够监测图像信息,比如侧面物体的大小和外形。视频传感器能够监测其他的道路使用者、交通讯号和路标等情况。传感器发出的信息能够实现车道偏离警告和交通讯号识别功能。
其他基础设施如交通讯号、转弯或山坡等信息可以通过舆图来获得。超声波传感器用于低速情况,比如停车,同时不需要高探测范围。而且内部数据可以收集起来提供给其他车辆。通过车对车通讯进行数据传递,来监测车流密度。
另外,通过不同传感器获得的数据可以相互融合,用于增加系统功能或增强现有的功能。比如,雷达、摄像机和机载激光雷达与导航数据的融合对改善车辆性能十 分重要。通过将从摄像机和舆图的信息进行结合,就能进步交通讯号识别系统的识别率。探测到的交通讯号再与eHorizon的数据进行对 比,eHorizon能够通过提供基于导航数据的道路基础设施具体信息来支持ADAS的功能。计算置信水平就能决定向司机显示哪种交通讯号。融合这些传感 器还能获得一种新的功能,即Sensitive Guidance,这是融合了雷达或摄像机系统的导航系统。导航系统的输出与交通情况、雷达或摄像机传感器相适应,比如监测盲点中或其他车道中的车辆。
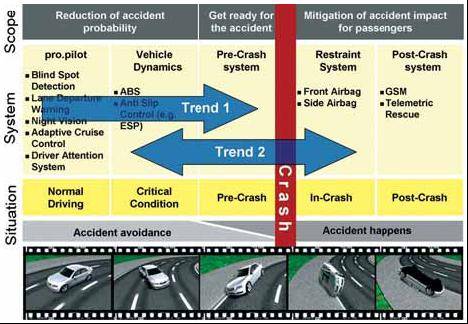
图5 主动和被动安全:未来的发展趋势
无论是正常驾驶或在危险环境中驾驶,目前市场上多数驾驶辅助系统都是通过提供附加信息来帮助司机的,如图5所示。在上述两种情况中,系统都能够帮助减少碰撞事故的发生。高级驾驶辅助系统未来有两种发展趋势:
趋势1:从预警系统到干预系统都发生了一些变化。ADAS目前主要职责是在危急情况下提醒司机,比如盲点检测系统。系统未来将会向干预系统发展,即在限定的情况下
pro pilot ADAS Freescale TI ADI 相关文章:
- 基于Protel 99 SE环境下PCB设计规范与技巧的研究(08-30)
- Xilinx全新参考设计提供业界首个单芯片400G解决方案(02-12)
- 纵横交错-九大最流行现场总线“叱咤”工控领域(07-08)
- 全面解析高级驾驶辅助系统ADAS(10-03)
- 从手机双摄像头发展看iPhone7是否会搭载?(07-15)
- 人工智能处理器三强Intel/NVIDIA/AMD谁称霸?(07-23)