基于车载自组网络模式的小车互联模型设计方案
扩展功能:
在小车实现自动避障的基础上,小车能够以最佳路线绕过障碍物,并能防止滑落;最终实现在一定环境下(包括障碍物和滑坡)两辆小车可以在一定的速度范围内无差错行走; 在小车上实现无线定位系统,PC上可以看到小车在整个地图中的位置信息,并能根据小车的移动,做出相应的更新; 小车与小车之间构建一个Zigbee网络,这个网络用于收集周围的环境信息,并组成车载自组网络,给单片机留更多的资源来进行视频传输及对传感器信息的融合处理; 小车通过图像处理技术完全自主行驶,能识别和测量周围的物体,理解周围环境和所要执行任务的能力,并作出正确的判断及操作和移动等能力。一、硬件部分
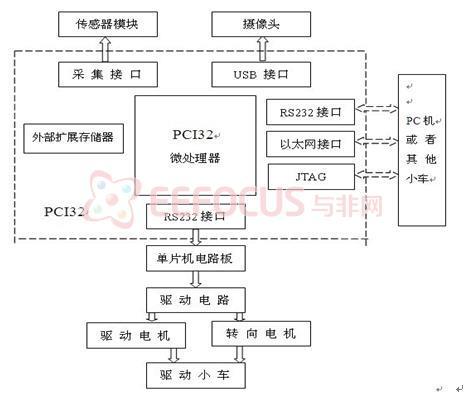
图3 系统的整体设计框图
二、软件部分
(1)软件构架
方案一:采用实时操作系统μC/OS-Ⅱ,"实时"两个字的意思就是对响应时间有严格的要求。实时操作系统贵在实时,要求在规定的时间内完成某种操作。主要用在工业控制中。具有:高精度计时系统;多级中断机制;实时调度机制,包括两个方面,一是在调度策略和算法上保证优先调度实时任务;二是建立更多"安全切换"时间点,保证及时调度实时任务。
方案二:采用无操作系统算法,一般没有明显的操作系统支持,而是通过汇编语言编程对系统进行直接控制。主要特点是系统结构和功能都相对单一,针对性强,无操作系统支持,几乎没有用户接口。
根据两种方案的特点,选用方案一作为本次设计的操作系统μC/OS-Ⅱ。
(2)通讯协议
方案一:采用IEEE802.l1p标准,IEEE802.11p(又称WAVE;Wireless Access in the Vehicle Environment)是一种由IEEE 802.11标准发展而来的通讯协议。这个通讯协议主要用在车用电子的无线通讯上。它又对IEEE802.11扩充延伸,来满足ITS系统(Intelligent Trans- portation Systems,ITS)相关应用的需求,802.11p将用在车载通讯(或称专用短距离通讯,Dedicated Short Range Comu- nication,DSRC)系统中。IEEE802.l1p标准主要是解决移动的Ad-hoc网络快速连接高频率切换问题和新的安全问题。从性能上看,802.11p最高传输速率可以达到27Mbps,传输范围达1000米。
方案二:采用IEEE802.11a标准,IEEE802.11a工作于5GHz的U-NII频段,该标准使用OFDM(正交频分复用)调制数据,物理层速率可达54Mbps,传输层可达25Mbps。其具有较少冲突的特点,因为2.4GHz 的频带已经被广泛使用。但在上飞速行驶的汽车和复杂的道路状况给物理层带来了很大的挑战,在移动的Ad-hoc网络快速连接高频率切换问题和新的安全问题上IEEE802.11a标准显得有点无力
根据两种方案的特点,选用方案一作为本次设计的操作系统μC/OS-Ⅱ。
(3)软件流程图
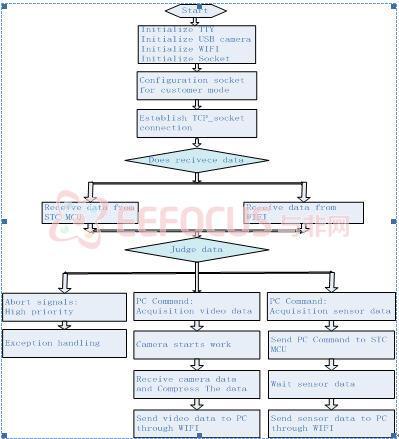
图4 软件流程图
作品优势
设计方法和过去采用传统的方法相比,具有以下明显优势:
(1) 电路简单,可靠性强。Digilent Cerebot™ 32MX4开发板是一个功能强大的微控制器开发板,具有一个全新Microchip® PIC32™微控制器,具有大量的I/O接口和电源选项;
(2)采用mC/OS-Ⅱ实时操作系统。响应时间短,能提供及时响应和高可靠性;支持多任务,具有任务优先级,任务调度是基于优先级的抢占式调度和时间片轮转调度的算法;具有多种中断级别,方便管理小车的各种行为;
(3)基于802.11p协议组建无线网络。802.11p协议是一种由IEEE 802.11标准发展而来的通讯协议,这个通讯协议主要用在车用电子的无线通讯上,来满足ITS系统(Intelligent Trans- portation Systems,ITS)相关应用的需求;
(4)人机界面良好,操作简单。PC上集成了控制软件,可以几乎无延时看到智能小车
采集回来的视频信息,并通过软件上的按键控制摄像头的偏移、小车的转向和速度等。
PC机上的控制软件demo如下图所示:
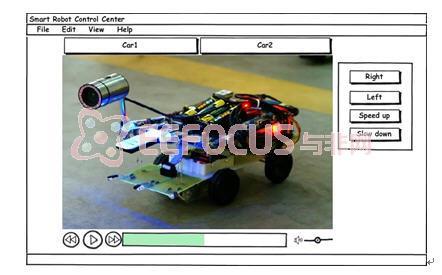
图5 控制软件demo
车联网 RS232 自组网络 PIC32 实时操作系统 相关文章:
- NEC网络车载智能通信系统(07-15)
- 基于RFID信息安全的车联网分析(11-12)
- 基于车联网的车辆信息远程搜集数据系统(01-27)
- 通用车联网有望采用嵌入式 搭载4G系统(11-23)
- 车联网技术及瓶颈解析(05-24)
- 车载模块原理分析与电路设计详解(03-16)