基于车载自组网络模式的小车互联模型设计方案
并没有哪个大学或组织侧重于研究智能移动机器人间的通信。尤其在汽车行业越来越智能化的今天,把我们已有的导航机器人、视觉导航系统等等,通过无线自组网应用到汽车通信领域显得尤为重要。开发这样一种网络就需要ad-hoc技术和当今国际研究热点--802.11p协议。
Ad-Hoc的英文原意是"特别的、特定的",Ad-Hoc网络是建立在特定场合的无线网络,由路由器Router和主机Host组成,这些节点可以任意移动位置,因此网络的拓扑结构是任意而不可预测的。Ad-Hoc网络的应用场合非常广泛,早期应用于军队、警察、救护等系统中,这些场合情况紧急,时常伴有灾难和危险。1972年,美国DARPA(Defense Advanced Research Project Agency)就启动了分组无线(PRNET,Packet Radio NETwork)项目,研究分组无线网在战场环下数据通信中的应用。项目完成之后,DAPRA又在1993年启动了高存性自适应网络(SURAN,Survivable Adaptive Network)项目,研究如何将PRNET的成果加以扩展,以支持更大规模的网络,还要开发能适应战场快速变化环境下的自适应网络协议。1994年DARPA又启动了全球移动信息系统(GloMo,Globle Mobile Information Systems)项目。在分组无线网已有成果的基础上对能够满足军事应用需要的、可快速铺设、高抗毁性的移动信息系统进行全面深入的研究,并一直持续至今。
早前提出的移动自组织网络(MANET)是一种自治的网络,移动节点可以在飞机、船舶上,也可在卡车、小汽车上。从这一意义上来说,车载自组织网络(VANET)完全可以看作是移动自组织网络MANET的一个重要分支。车辆自组网与传统无线通信系统相比较,具有车辆高速行驶、信道快速衰落、多普勒效应严重、网络拓扑变化快等特征,这些也都是当前无线移动通信面临的主要难题。
把Ad-Hoc技术和移动自组网的概念应用到汽车通信领域成为一种趋势,车载环境无线接入(WAVE)被视为下一代专用短距通信(DSRC)技术,能够提供高速的车到车(V2V)和车到中心台(V2I)数据传输,主要可以用于智能交通系统(ITS),车辆安全服务以及车上因特网接入。WAVE系统工作于5.850~5.925 GHz,采用OFDM传输技术,能够达到3~27Mbit/s的信息传输速率。在WAVE系统中,一个路侧单元(RSU)可以覆盖方圆1 000英尺。WAVE系统就是基于IEEE 802.11p协议,此系统就能克服以往车载自组网络具有车辆高速行驶、信道快速衰落、多普勒效应严重、网络拓扑变化快等特征。
2、设计目的
1994年,美国的一个机器人丹蒂(Dante)探索了南极洲的埃力柏斯火山口,这无疑是智能机器人最新技术的示范。该探险行动实际上是由相互协作的两个机器人来执行的。其中一个是善于爬坡的运输机器人,把丹蒂从营地送到火山口边缘,然后丹蒂用攀登绳索下去取样。虽然该项行动遇到故障,但是人们普遍承认该机器人系统是成功的。
事实上,这是代表当前智能机器人最高水平的自主式移动机器人(AMR)系列中的一个。自主式移动机器人,它要求在野外非结构化环境中自主地执行一系列任务,例如侦察、探险、搬运等等。环境变化的不确定性意味着机器人必须有良好的环境感知、行动规划与决策、灵巧的机动控制等功能。涉及的技术领域包括机器视觉、多传感融合、全局与局部控制、学习与决策,以及机械构造、运动学与动力学控制等。
我们研究设计的智能小车,不仅可以用于野外探险,还可用于楼宇、仓库等一般场合,以及用于、矿井、防爆、毒气泄漏等恶劣环境。
智能小车上实现了实时视频采集及无线传输,可以方便的实现对目标环境的远程监控,在安防、交通、智能楼宇等领域有很好的应用前景。
对于汽车行业飞速发展的今天,拥有私家车的人群越来越多,而避免交通事故显得尤为重要,我们研究的小车相互之间可以自动传送警告信息,减小了交通事故的发生率;采用的通信协议-802.11p也是国际上的研究热点。
下图为探险者利用智能小车探路的模型化表示:
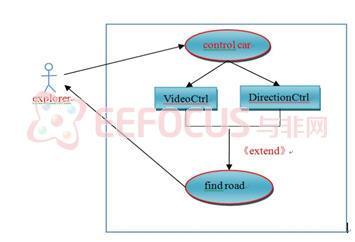
图1 智能车在探险中应用的模型化表示
下图为基于802.11p协议的车载自组网在高速公路上的应用方案:
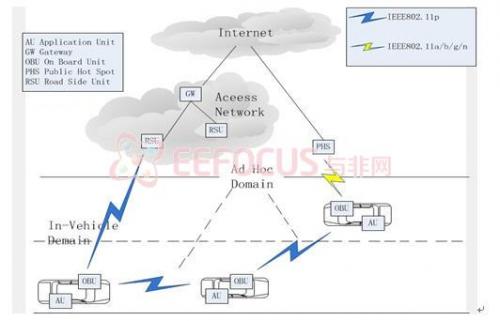
图2 802.11p的车载自组网应用方案
方案论证
此智能小车主要完成基本功能和扩展功能:基本功能是必须完成的功能,扩展功能可以根据时间和难度做出适当的剪裁。
基本功能: PC通过ad-hoc网络向小车发送控制命令到小车的控制中心(单片机),控制中心控制步进电机,从而控制小车的转向和速度; 小车在行走的过程中,能够实现自动避障,通过超声波传感器,把障碍物信息传给单片机,单片机控制电机,使小车停止行走或倒退; 前方小车遇到障碍物时,完成避障
车联网 RS232 自组网络 PIC32 实时操作系统 相关文章:
- NEC网络车载智能通信系统(07-15)
- 基于RFID信息安全的车联网分析(11-12)
- 基于车联网的车辆信息远程搜集数据系统(01-27)
- 通用车联网有望采用嵌入式 搭载4G系统(11-23)
- 车联网技术及瓶颈解析(05-24)
- 车载模块原理分析与电路设计详解(03-16)