基于K线/CAN总线的KWP2000协议分析及其协议栈的开发与测试
1 前言
在汽车故障诊断领域,针对诊断设备和汽车ECU之间的数据交换,各大汽车公司几乎都制订了相关的标准和协议。其中,欧洲汽车领域广泛使用的一种车载诊断协议标准是KWP2000(Keyword Protocol 2000),该协议实现了一套完整的车载诊断服务,并且满足E-OBD(European On Board Diagnose)标准。KWP2000最初是基于K线的诊断协议,由于K线物理层和数据链路层在网络管理和通讯速率上的局限性,使得K线无法满足日趋复杂的车载诊断网络的需求。而CAN网络(Controller Area Network)由于其非破坏性的网络仲裁机制、较高的通讯速率(可达1M bps)和灵活可靠的通讯方式,在车载网络领域广受青睐,越来越多的汽车制造商把CAN总线应用于汽车控制、诊断和通讯。近年来欧洲汽车领域广泛采用了基于CAN总线的KWP2000,即ISO 15765协议,而基于K线的KWP2000物理层和数据链路层协议将逐步被淘汰。
在网络协议开发和测试应用方面,美国MathWorks公司和德国Vector公司提供了功能强大的开发和测试工具,可分别用于协议栈源码的开发和ECU测试。
2 基于K线的KWP2000协议
基于K线的KWP2000协议标准主要包括ISO/WD 14230-1~14230-4,各部分协议与OSI模型的对应关系如表1所示。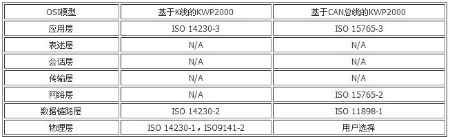
表1 KWP2000协议与OIS模型的对应关系
ISO 14230-1规定了KWP2000协议的物理层规范(K线、L线),它在ISO 9141-2的基础上把数据交换系统扩展到了24V电压系统。ISO 14230-2规定了KWP2000的数据链路层协议,包括报文结构、初始化过程、通讯连接管理、定时参数和错误处理等内容。K线的报文包括报文头、数据域和校验和三部分,其中报文头包含格式字节、目标地址(可选)、源地址(可选)和附加长度信息(可选),如表2所示。
表2 基于K线的KWP2000报文结构[3]
1)可选字节,取决于格式字节Fmt的A1A0位
2)服务标识符(Service ID),数据域的第1个字节
在开始诊断服务之前,诊断设备必须对ECU进行初始化,通过ECU的响应获取ECU的源地址、通讯波特率、支持的报文头格式、定时参数等信息。ECU所支持的报文头和定时参数信息包含在ECU返回的"关键字(Key Word)"中(这也是协议命名的由来)。关键字由两个字节构成,如图1所示,关键字的低字节中各位的含义如表3所示。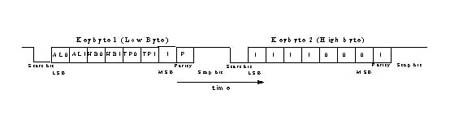
图1 关键字格式[3]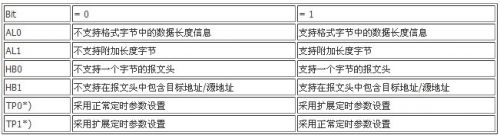
表3 关键字低字节中各位的含义[3]
*) 只允许TP0,TP1 = 0,1 或者1,0
诊断设备可以采用两种方式对ECU进行初始化--5Baud初始化和快速初始化,对于这两种初始化的时序在数据链路层协议[3]中均有明确规定。完成初始化过程后,诊断设备和ECU方可进行应用层的诊断服务和响应。ISO 14230-3规定了应用层的服务规范,包括诊断管理功能组、数据传输功能组、诊断信息传输功能组、输入/输出控制功能组、远程启动ECU例程功能组、数据上载/下载功能组和扩展功能组。在诊断服务请求/响应过程中,诊断设备和ECU必须遵循图2所示的时序和相关定时参数。对于初始化和诊断服务过程中出现的各种定时错误,在数据链路层和应用层协议里面都有相应的处理规范,诊断设备及ECU的应用程序都必须严格遵守。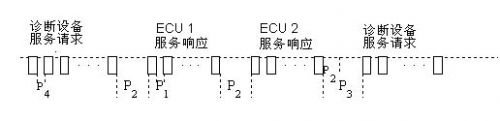
图2 K线诊断服务时序图[3]
3 基于CAN总线的KWP2000协议
基于CAN总线的KWP2000协议实际上指的就是ISO/WD 15765-1~15765-4,该协议把KWP2000应用层的诊断服务移植到CAN总线上。数据链路层采用了ISO 11898-1协议,该协议是对CAN2.0B协议的进一步标准化和规范化;应用层采用了ISO 15765-3协议,该协议完全兼容基于K线的应用层协议14230-3,并加入了CAN总线诊断功能组;网络层则采用ISO 15765-2协议,规定了网络层协议数据单元(N_PDU,如表4所示)与底层CAN数据帧、以及上层KWP2000服务之间的映射关系,并且为长报文的多包数据传输过程提供了同步控制、顺序控制、流控制和错误恢复功能。
表4 网络层协议数据单元(N_PDU)格式[7]
1) 地址信息:包含源地址(SA)、目标地址(TA)、目标地址格式(TA_Type)和远程地址(RA)
2) 协议控制信息:包含四种帧格式,见表5
3) 数据域:KWP2000服务标识符(Service ID) + 服务参数
应用层协议规定了四种服务数据结构,<Service_Name>.Request、<Service_Name>.Indication、<Service_Name>.Response和<Service_Name>.Confirm,分别用于诊断设备(Tester)的服务请求、ECU的服务指示、ECU的服务响应和Tester的服务确认。这些数据结构中包含了地址信息、服务请求ID和服务请求参数等内容。基于CAN总线的KWP2000诊断服务流程如图3所示。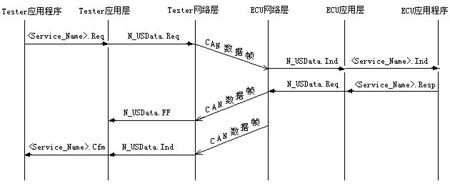
图3 基于CAN总线的KWP2000诊断服务流程图
从上面的服务流程可以看出,基于CAN总线的KWP2000协议支持多包数据传输,并且多包数据的管理和组织是在网络层完成的,应用层不必关心数据的打包和解包过程。为实现这一功能,网络层定义了四种PDU(以PCI类型进行区分,如表5所示):
单帧(Single Frame,SF) - 数据域及PCI可在一个CAN数据帧中容纳时,服务报文以单帧CAN报文进行发送。
第一帧(First Frame,FF) - 数据域及PCI不能在一个CAN数据帧中容纳时,服务报文以多帧CAN报文进行发送,其中第一帧(FF)除传送数据外,还包含了多包数据的长度信息。
连续帧(Consecutive Frame,CF) - 多包数据中除第一帧外的连续数据帧,除传送数据外,还包含了多包数据的包序号。
流控制帧(Flow Control,FC) - 用于多包数据传输过程中的流控制,不包含数据,只包含流控制状态、数据块大小和最小间隔时间等流控制信息。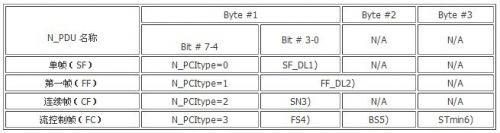
表5 15765协议网络层四种PDU对应的PCI格式[7]
- 基于CAN总线的车载故障诊断仪的设计与实现 (07-15)
- 现代电动车辆中电控技术应用(03-01)
- CAN总线混合动力汽车电控系统的设计与实现(08-29)
- 利用CAN总线的进行汽车轮速传感器系统设计(09-22)
- CAN总线在CFA6470混合动力汽车中的应用(09-25)
- 基于CAN总线的汽车发动机智能电子控制器研究(10-20)