车辆电控主动安全系统
车辆在安全方面有两种要求:第一种是被动安全,要求在发生碰撞时能够保护乘员,而另一种是主动安全,即提高车辆行驶的稳定性,要求防范事故于未然。利用电子控制技术来提高车辆主动安全系统的性能并扩展其功能已得到广泛的应用和发展,现代车辆电子控制主动安全系统主要包括ABS、BAS、ASR(TCS)、ESP等。
一、ABS
防抱制动系统ABS,英文全称Anti-lock Braking System。
制动时方向的稳定性,是指汽车制动时仍能按指定方向的轨迹行驶。当汽车高速行驶时,如果因为紧急制动而使车轮完全不能转动(专业术语称之为"车轮抱死"),那是非常危险的。若前轮抱死,将使汽车失去转向能力;若后轮抱死,将会出现跑偏、侧滑甚至甩尾,对行车安全造成极大的危害。
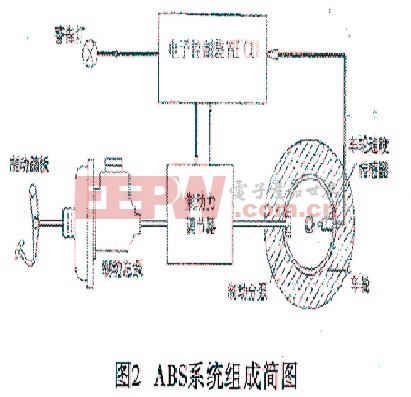
汽车的制动力取决于制动器的摩擦力,但能使汽车制动减速的制动力,还受地面附着系数的制约。当制动器产生的制动力增大到一定值时,汽车轮胎将在地面上 出现滑移。据试验证实,当车轮滑移率为15%~20%时附着系数达到最大值(图1),因此,为了取得最佳的制动效果,一定要将车轮滑移率控制在15%~20%范围内。ABS的工作原理是,依靠装在各车轮上高灵敏度的车轮转速传感器(以及车身上的车速传感器),通过计算机控制,一旦紧急制动时发现某个车轮抱死,计算机立即指令压力调节器使该轮的制动分泵减压,使车轮恢复转动(图2)。ABS的工作过程实际上是抱死→松开→抱死→松开的循环工作过程,刹车在1s的时间内可作用60至120次,即相似于机械自动化的"点刹"动作,使车轮始终处于临界抱死的间隙滚动状态(车轮滑移率在15%~20%范围内,即图1阴影部分)。从而提高制动减速度,缩短制动距离,但最重要的还是克服侧滑和跑偏,保证汽车的方向稳定性,防止车身失控等情况的发生。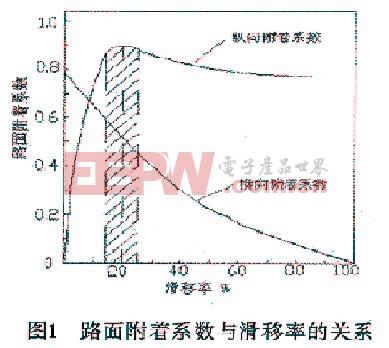
以上介绍的是单参数(轮速)控制ABS,还有一种双参数(轮速、车速)控制ABS,它增加了一个车速传感器测速雷达)。这种ABS可保证滑移率的理想控制,防抱制动性能好,但由于增加了一个测速雷达,因此结构较复杂,成本也较高。根据ACEA(欧洲车辆制造协会)的调查,如今每一辆欧洲生产的新车都搭载了ABS系统,全世界有超过60%的新车拥有此项装置。在我国,2005年颁布的《机动车运行安全技术条件》(国家标准)规定:"从10月1日起,总质量大于12000kg的长途客车和旅游客车、总质量大于16000kg允许挂接总质量大于10000kg的挂车的货车及总质量大于10000kg的挂车必须安装符合GB/T13594规定的ABS。"
二、BAS
制动辅助系统BAS,英文全称Brake Assistant System。
BAS是ABS的有力补充。汽车在紧急情况下,尽管驾驶人员做出迅速反应,但往往不能对制动踏板施加足够的压力,或者因为犹豫而使全力制动过迟,甚至做出错误反应。如图3所示,如果一直用很小的力踩下制动踏板,要持续较长的时间才能完全制动,制动行程较长,称为制动不足;如果在制动的初期用了一个很小的制动踏板力,且这个力的增加非常缓慢,也使得制动起效滞后,称为制动犹豫;而由BAS辅助完成的制动效果大不一样,制动作用迅速起效,大大缩短了制动距离。BAS根据驾驶人员踩下踏板的力度及速度,将制动力适时加大,从而提供了一个有效、可靠、安全的制动。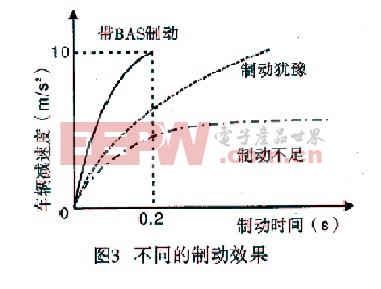
BAS电子控制单元从发动机电控模块ME、牵引系统控制模块、BAS踏板行程传感器、BAS释放开关等接收输人信号,经转换处理后输出到BAS电磁阀、BAS指示灯。电子控制单元根据输人信号决定其控制模式:①若驾驶员踩制动踏板的速度未达到启动BAS的规定值,则BAS制动调压器中的电磁阀处于一个基础的位置,此时为常规操作模式;②当行驶速度高于8km/hld制动踏板速度满足激活系统的条件时,电子控制单元激活电磁阀,电磁阀立刻对压力室和真空室加压,从而施加最大制动压力,即使驾驶员只稍稍踩一下制动踏板或未能给其施加最大压力,这一过程仍可产生(图4)。由于防抱制动系统根据滑动系数继续精确地校准制动力,从而使驾驶员仍可控制汽车驾驶,因此,在自动紧急制动过程中,车轮不会抱死;③当行驶速度小于3km/h或BAS持续工作时间大于20s时,BAS压力减弱。如果驾驶员把脚从制动踏板上挪开,专用减压装置会关闭电磁阀,并立刻中止自动助力作用。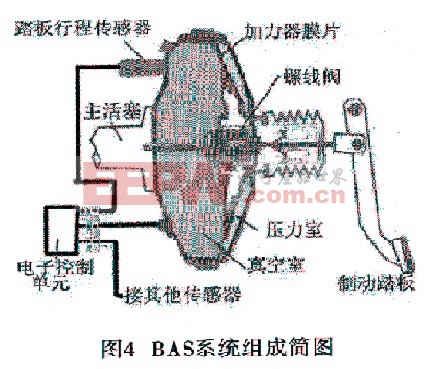
在2000年生产的凌志LS400上开始将BAS列为标准配备,它和ABS配合.工作,在紧急制动的状况下系统如感应到制动踏板力不足时,BAS会自动补偿对制动系统的施力,让车轮尽早达到抱死状态,以便激活ABS,使制动距离达到最短。
在干燥路面上,由于驾驶员对踏板加压不足,大多数驾驶员需要长达73m的制动距离才
- 基于XC164的六通道ABS开发板设计(11-25)
- 本田(HONDA)奥德赛(ODYSSEY)轿车电路—防抱死制动控制系统(上)(11-30)
- 本田(HONDA)奥德赛(ODYSSEY)轿车电路—防抱死制动控制系统(中)(11-30)
- 楔式制动器设计提高了线控刹车的性能(01-04)
- 智能大电流功率开关可有效降低汽车电子系统成本(01-09)
- ANSOFT产品在汽车电子及系统设计中的应用(01-19)