基于磁场检测的寻线小车传感器布局研究
全国大学生"飞思卡尔"智能车比赛新的竞赛规则中,用通有20kHz交变电流的载流导线取代了原来的白底黑线道路,要求小车通过检测载流导线周围的电磁场信号来控制小车沿着载流导线前进。
磁场模型及磁场检测
图1展示了往年比赛的赛道,2010年图上黑线要用导线代替,并在导线中通以20kHz的交变电流,需要通过传感器检测周围的电磁场来确定道路(导线)相对于小车的位置。由电磁学可知,导线周围的空间充满了交变的电磁场,如果在里面放置一个电感线圈,电磁感应会使线圈中产生交变的电流。在导线位置和导线中电流既定的条件下,线圈中感应电流(或者电压)是空间位置的函数。因此,电感线圈就可以作为传感器。
直接分析交变的电磁场并不是一个可取方法,考虑到问题的线度远远小于20kHz的电磁波波长,因此可以先讨论直流的情况,然后将结果应用到交变的条件下。问题可以简化为:载流导线中通过直流电流I,它在空间产生了静态磁场B(x,y,z),电感线圈中的电压有效值U正比于所在位置的磁感应强度B(x,y,z)。
为了从电感线圈感应电压中获得道路的信息,需要分析导线周边磁场的分布。由毕奥-萨法尔定理可知,空间任一点的磁感应强度可以看成是导线上电流元产生的磁场之和,即:
其中积分路径遍及整个载流导线。上述积分只有在一些特定的曲线下才可以求得解析解,对于一般的曲线,可以通过数值积分求得数值解,若要考察整个空间的磁场分布,则可以借助一些专业的电磁场分析软件进行全空间的数值仿真,比如Ansoft Maxwell,CST EM Studio等。
从道路元素来看,赛道一般可以分成直道、转弯、S道、回环道等形式(如图1),其中直道是最简单的,因此,分析清楚直道情况下的传感器响应及赛车控制是基础。为了讨论方便,我们作以下约定:(1)小车车体坐标系中,定义小车前进的方向为Y轴正向,顺着Y轴的右手边为X轴的正向,Z轴指向小车正上方,如图2所示;(2)水平线圈是指轴线平行于Z轴的电感线圈,垂直线圈是指轴线平行于X轴的线圈,轴线平行于Y轴的线圈所感应到的电动势远小于上述两类线圈,在本文中暂不做讨论,但该类摆放线圈在回环路检测中将可以用到;(3)BX是指向载流导线右手边的电磁感应强度,BZ是指向载流导向正上方的电磁感应强度。显然,垂直线圈感应的是BX变化率,水平线圈感应的是BZ的变化率。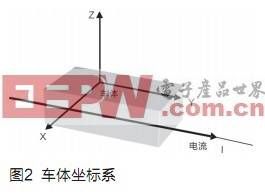
直道附近的磁场分布,可以近似为无限长的直导线上的磁场分布,容易算得距离长直导线距离为r的点的磁感应强度:
进而可以推出:
则B'X、B'Z分别和BX、BZ有相同的变化趋势。图3和图4显示了当分别取5、8、10时B'X和B'Z的变化趋势。由图可知:(1)B'X是x的偶函数,在Y轴两侧单调;B'Z是x的奇函数,在Y轴两侧没有单调关系;(2)在相同的高度下,B'X幅值是B'Z的两倍,但是在x=20的时候,B'X只有B'Z的一半左右了,因此B'X的衰减较B'Z快很多。综上可推知,水平线圈比较适合做x的正负判别,垂直线圈比较适合用来解算x的具体数值,B'Z较B'X衰减慢得多,说明水平线圈对远处道路状况相对比较敏感,可以用来预测前方的弯道。
位置解算算法
位置解算就是要通过传感器检测数值确定当前道路的类型和位置。道路位置通常在小车坐标系中描述,如图5所示,ABCD代表车体,XY是车体坐标系,如果传感器安放在四个角上,位置解算就是要通过四个角上线圈的感应电压,确定载流导线与AB、CD的交点E、F的坐标,并推断道路(载流导线)的形状。
基于双垂直线圈的位置解算
垂直线圈中感应电动势的变化特征使得它适合用来解算具体的位置参数。B'X是偶函数,一个线圈的数值无法确定正负(导线左边还是右边),因此考虑两边对称地各放一个,如图5中的A、B点各放一个。
首先考虑直线情况。记AE的长度为lA,BE的长度为lB,由(5)(6)式及电磁学知识易得,A、B两处垂直线圈中感应电压的有效值为:
其中k是一个比例常数,与电磁环境和具体的电磁线圈有关,可以由实验确定,q是导线与小车坐标系Y轴的夹角,如图5。显然,用(7)(8)式来求解lA和lB不是件简单的事情,最好能将cosq去掉。图6显示了当q=20o,h=10,k=1时,去掉cosq前后U'Ax的曲线。此时,偏角q只在lA取值较小时才有一定的影响,同时当q更小时,这种影响会更加有限,因此,在近似分析中,可以将cosq去掉。为了分析方便,将(7)(8)式简化为:
U'Ax、U'Bx在在物理上分别是A、B点的垂直传感器感应电压的有效值除以(7)(8)式中的比例常数k,因此是解算算法中的已知数据。从(9)(10)式解算lA、lB就比较简单了,以下给出两个算法:
(1)由于两个传感器之间的距离是固定已知的,可以设
上式和(9)(10)
- 基于载流导线循迹智能车的数学模型(10-12)