基于电磁场检测的寻线智能车设计
时间:09-22
来源:电子产品世界
点击:
具体放大倍数需要根据实际负载进行计算。本设计的小车控制电路如图6所示。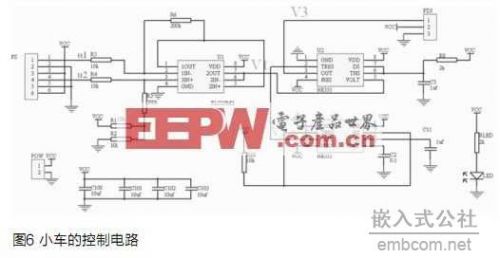
首先,把由两个电感得到的感应电动势经调理、放大后得到的电压输出u1和u2送入由运放组成的减法器中进行减法运算,然后再经由运放组成的电压跟随器送给下一级电路。经过分析,这一级电路的输出大致可由下式进行计算:
后一级电路由两个555定时器组成,其中下方的555构成一个占空比非常接近于1的脉冲发生器,作为上方555的触发脉冲。因为此触发脉冲的低电平信号非常窄,所以能很好的保证上方555构成的单稳态电路正常运行。波形如图7所示。该脉冲信号频率为:
上方的555定时器构成一个单稳型压控振荡器,它的脉宽受输入V1的控制,输出即PWM信号。当V1较大时,即两个电感线圈中的感应电动势相差较大时,亦即小车偏离导线向左行驶时,则脉宽较大,舵机将控制小车向右行驶;当V1适中时,接近,即小车沿导线行驶时,则脉宽接近1.5ms,小车按直线行驶;当V1较小时,即小车偏离导线向右行驶时,则脉宽较小,舵机将控制小车向左行驶。从而,控制小车大致循着导线行驶。另外,改变构成减法器的电阻的值,可以调整小车反应的灵敏度,进而防止出现小车以导线为中轴线左右摇摆的现象。
- 基于磁场检测的寻线小车传感器布局研究 (02-07)
- 基于16位单片机MC9S12DG128的智能车控制系统设计与实现(11-11)
- 基于9S12DG128的智能车控制系统设计与实现(08-27)
- 数字CMOS摄像头在智能车中的应用(08-29)
- 基于载流导线循迹智能车的数学模型(10-12)
- 一种非均匀行采集的智能车路径识别算法(10-22)